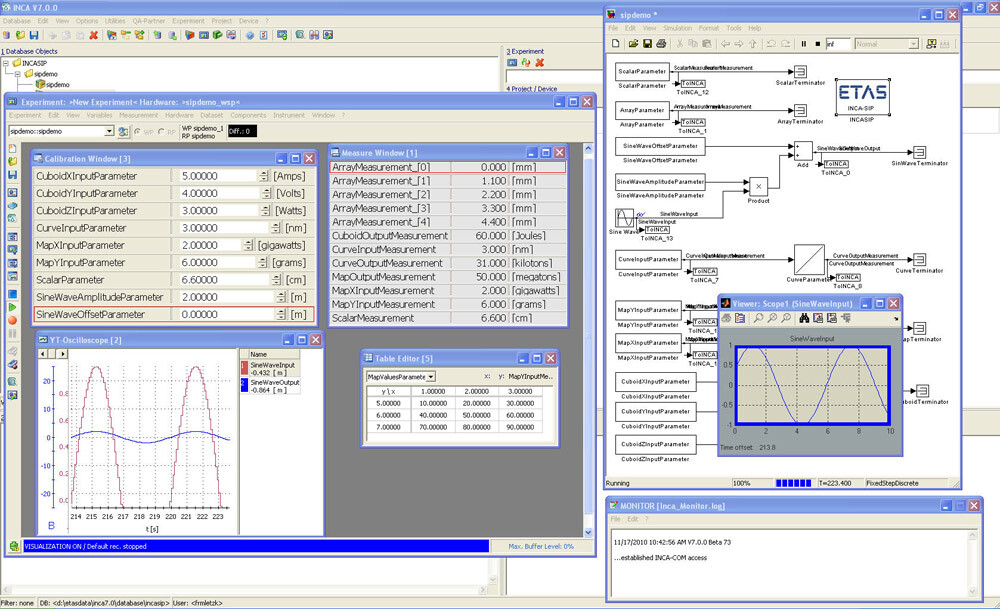
INCA와 MATLAB®/Simulink®은 XCP 프로토콜을 통해서 INCA-SIP에 의해 연결됩니다. INCA-SIP로 인해서 설명 파일 및 INCA 구성이 Simulink 환경에서 자동으로 생성되며, INCA로 전송됩니다. 시뮬레이션이 실행되는 동안에 측정이 기록될 수 있으며, INCA로 매개변수가 변경될 수 있습니다. INCA-SIP는 변경된 파라미터 값을 Simulink로 전송합니다.
INCA-SIP는 측정, 캘리브레이션 및 진단을 위한 Simulink function 개발자에게 효율적이고 자동차에 특정된 환경을 제공합니다. INCA를 통해, 개발 과정 동안에 실험 및 데이터 기록이 애플리케이션 엔지니어들 사이에 쉽게 재사용되고 상호 교환될 수 있습니다.
기능 한눈에 보기
- INCA를 이용하여, PC에서 Simulink® 제어 모델의 초기 검증, 사전 캘리브레이션 및 테스트
- 프로토타입 하드웨어 또는 ECU 불필요
- Simulink® 환경 캘리브레이션의 짧은 설계 반복작업 제공
- 기존 캘리브레이션 데이터의 용이한 전달
- 시뮬레이션에 대한 자극으로서, 테스트 주행으로부터의 INCA 측정 데이터의 사용
- 전체적인 제어 개발 과정을 통해서 INCA 측정 및 캘리브레이션 툴의 일관된 사용