이타스 툴은 차량 소프트웨어 개발의 전 단계에 걸쳐 소프트웨어 및 function 개발자, 테스트 엔지니어, 캘리브레이션 엔지니어, 특정 도메인을 위한 리서치 엔지니어들에 의해 사용되며, 소프트웨어와 ECU의 통합에서부터 차량 내 ECU의 캘리브레이션까지 다양하게 활용되고 있습니다. MATLAB®과 Simulink® 툴 역시 전자 제어 function 개발, 플랜트 모델링 및 최적화 작업 등을 위해 자동차 분야에서 널리 사용됩니다.
이타스와 MATLAB®/Simulink® 각 툴 환경의 장점을 완벽히 결합하기 위해, 이타스는 MATLAB®/Simulink®에 대한 광범위한 인터페이스를 제공합니다. 이에 따라 이타스와 MATLAB®/Simulink® 환경에서 작업하는 엔지니어들은 업무별로 적합한 솔루션으로 원활하게 전환하여 사용할 수 있습니다.
이 페이지에서는 이타스 툴이 제공하는 MATLAB®/Simulink® 인터페이스에 대한 개요를 소개합니다.
Function 개발, 측정 및 캘리브레이션

이타스 INCA-SIP – Simulink® 통합 패키지
이타스 INCA-SIP – Simulink® 통합 패키지는 function 개발자들에게 측정 및 캘리브레이션 작업, Simulink® 모델의 데이터 기록을 위한 효율적이고 자동차 산업 특화된 INCA 환경을 제공합니다.
이타스 INCA 소프트웨어는 캘리브레이션 엔지니어가 개발 프로세스 동안 실험 및 데이터 세트를 쉽게 재사용하고 공유할 수 있도록 해줍니다. INCA-SIP는MATLAB®/Simulink®가 XCP프로토콜을 통해 가상으로 INCA에 접속할 수 있도록 해줍니다.

이타스 INCA-MIP – MATLAB® 통합 패키지
MATLAB®은 수학적 알고리즘을 이용하여 엔진 제어 function의 최적화 작업과 측정 및 캘리브레이션 작업 자동화에 자주 사용됩니다.
이타스 INCA-MIP – MATLAB® 통합 패키지는 MATLAB® 툴박스를 통해 INCA 코어 시스템의 다양한 기본 function에 접근할 수 있도록 해주는 INCA의 add-on입니다.
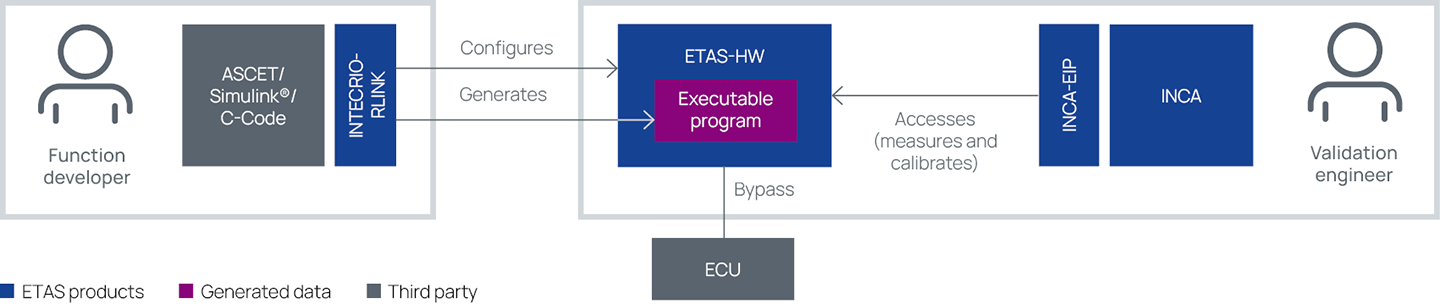
이타스 INTECRIO-RLINK – 프로토타이핑 블록셋
이타스 INTECRIO-RLINK – 프로토타이핑 블록셋은 실 환경에서 Simulink® function 모델의 래피드 프로토타이핑을 가능케 해줍니다. 이 블록셋은 이타스 ES830 래피드 프로토타이핑 모듈과 ES900 프로토타이핑 하드웨어 제품군을 지원합니다. INTECRIO-RLINK는 이타스의 통합 프로토타이핑 환경인 INTECRIO와 동일한 이타스 하드웨어 구성 옵션을 제공합니다. function 프로토타입은 이미 검증된 바이패스 기술을 통해 ECU에 연결될 수 있습니다. 이타스의 INCA 소프트웨어 제품은 사용자가 Simulink®에서 모델링한 전자 제어 시스템을 차량 내에서 검증할 수 있도록 해줍니다. 사용자는 INTECRIO-RLINK를 통해 Simulink® 환경에서 작업할 수 있습니다. 또한 사용자들은 여러 이타스 블록셋을 하드웨어로 구성할 수 있습니다.
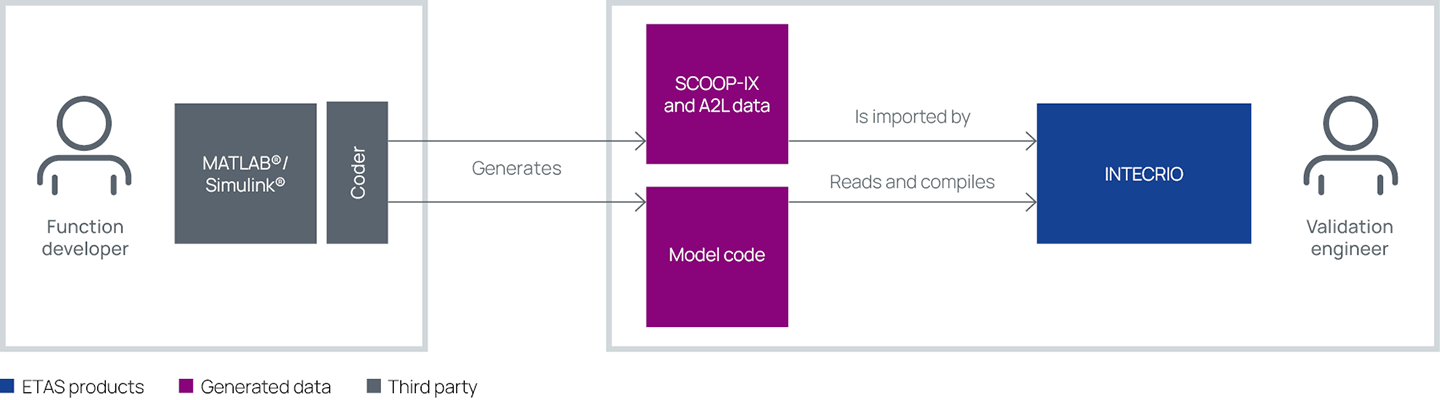
이타스 INTECRIO – 통합 프로토타이핑 환경
이타스 INTECRIO는 자동차 전자 시스템을 프로토타이핑하는 데 사용됩니다. INTECRIO는 래피드 프로토타이핑 실험 환경, function 모델과 소프트웨어 구성요소를 통합하기 위한 플랫폼을 포함합니다.
INTECRIO 통합 프로토타이핑 환경은 PC와 실제 환경에서 자동차 전자 시스템의 프로토타이핑을 가능하게 합니다. MATLAB®/Simulink® 모델과 이타스 ASCET 모델의 통합 및 AUTOSAR 소프트웨어 컴포넌트의 통합을 지원합니다.
ES830 프로토타이핑 모듈과 이타스 ES900 하드웨어 제품군의 모듈 및 다양한 종류의 바이패스 기술이 차량 내 테스팅을 위해 제공됩니다. INTECRIO의 COM API를 사용하면 복잡한 프로세스도 쉽게 자동화할 수 있습니다. 또한 INTECRIO는 엔지니어링을 통해 개별 상황에 맞게 추가로 적용할 수 있습니다. INCA 소프트웨어 제품은 통상적인 방법으로 실제 하드웨어를 이용해 최종 테스트를 수행하므로 자동차 function의 보편적이고 유연한 프로토타이핑이 수행될 수 있음을 보장합니다.
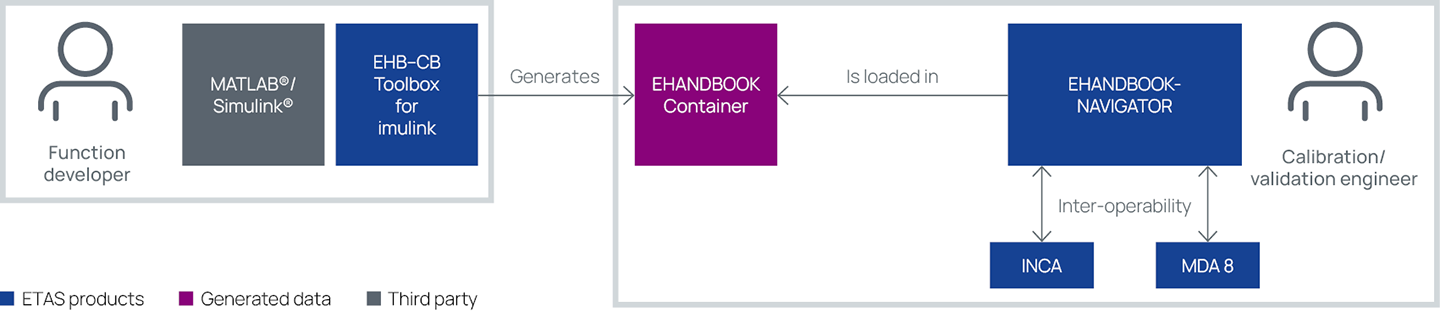
ETAS EHANDBOOK – 대화형 ECU 소프트웨어 문서
EHANDBOOK 은 ECU 소프트웨어 문서화를 위한 솔루션입니다. EHANDBOOK은 모델 기반 (예: MATLAB/Simulink, ASCET 및 C코드) ECU 소프트웨어와 이타스 제품인 INCA, MDA 8등을 이용한 캘리브레이션 업무를 통합합니다. EHANDBOOK은 여러 ECU function 혹은 전체 애플리케이션 소프트웨어에 대한 문서를 생성하는 경우에 사용할 수 있습니다. 이는 ECU 소프트웨어가 Tier에 의해 만들어진 경우, OEM에 의해 만들어진 경우, 혹은 이 두 가지가 혼합된 경우에 상관없이 모든 경우에 활용이 가능합니다.
EHANDBOOK Container-Build Toolbox for Simulink 는 Simulink 내에서 직접 버튼을 눌러 EHANDBOOK 컨테이너를 생성할 수 있습니다. 즉, function/ 소프트웨어 개발자와 캘리브레이션 엔지니어가 대화형 문서를 바로 확인할 수 있다는 것 입니다. 이러한 방식으로 생성된 EHANDBOOK 컨테이너는 EHANDBOOK-NAVIGATOR (EHB-NAV)의 프로젝트와 원활하게 통합됩니다.
EHANDBOOK 내비게이터(EHANDBOOK-NAVIGATOR) 를 사용하면 복잡한 ECU 소프트웨어를 더 쉽게 이해할 수 있으므로 귀중한 작업 시간을 절약할 수 있습니다. EHANDBOOK-NAVIGATOR는 ECU function 간 종속성을 명확하게 시각화하고 신호 경로를 간단하게 모니터링할 수 있다는 장점이 있습니다.

이타스 EHOOKS – 바이패스 훅 삽입 툴
이타스 EHOOKS 는 HEX 및 A2L 파일만 연결하여 바이패스 훅을 ECU 소프트에어에 삽입해주는 툴 입니다. HEX 및 A2L 파일을 제외한 추가적인 ECU 정보는 필요하지 않습니다. 포함되어 있는 Simulink® 통합 패키지는 Simulink® 내에서 설정 및 ECU HEX 파일의 자동 생성을 가능케 해줍니다. 이것은 on-target 바이패스 실험을 위해 Simulink® 모델을 직접적으로 ECU 소프트웨어에 통합하기 쉽도록 해줍니다. 설정 절차가 Simulink® 내에서만 이뤄지기 때문에 빌드 프로세스는 간단합니다.
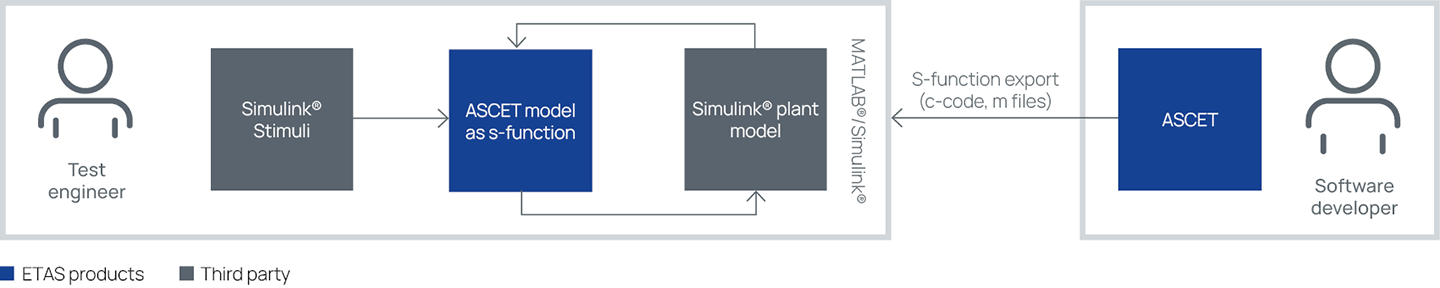
이타스 ASCET – 모델 기반 소프트웨어 개발
소프트웨어 개발자는 MATLAB® 및 Simulink®와 함께 이타스 ASCET를 통해 생성된 코드로 특정 모델을 시뮬레이션하고 테스트할 수 있습니다. 이 경우 ASCET은 MATLAB®에서 처리할 수 있는 S-function 으로 export 하는 기능을 제공합니다. 이를 통해 개발자는 ECU 소프트웨어를 모델링하고 ECU function의 물리적 동작을 모델링할 때 이타스 ASCET와 Simulink® 각각의 이점을 활용할 수 있습니다. 예를 들어, 물리적 제어 function은 ASCET-DEVELOPER로 개발되고 MATLAB®로 export될 수 있습니다. 그 이후 MATLAB®에서 경로, 차량 및 운전자 모델과 함께 시뮬레이션할 수 있습니다.
데이터 기반 모델링 및 최적화
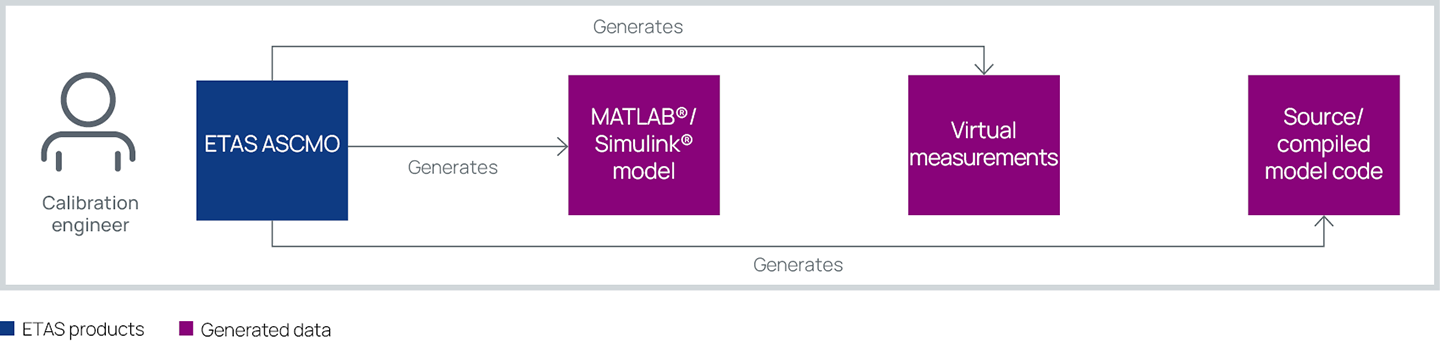
이타스 ASCMO – 복잡한 시스템의 거동을 정확히 예측
이타스 ASCMO는 사용자로 하여금 매우 높은 퀄리티의 데이터 기반 플랜트 모델을 생성할 수 있도록 해줍니다. 이타스 ASCMO는 측정 데이터를 기반으로 하여 복잡한 시스템 동작에 대한 정확한 수학적 모델을 제공하며, 이는 가상의 측정 작업에도 사용 가능합니다.
따라서 이타스 ASCMO를 활용하면 수차례의 반복적인 캘리브레이션을 거치지 않고도 복잡한 시스템의 거동에 대한 모델링을 빠르게 진행할 수 있습니다.
이타스 ASCMO 모델은 정확도가 높으며, 클릭 한번으로 Simulink®로 export되며 Simulink CoderTM 를 사용하여 코드를 생성할 수 있습니다. 데이터 기반의 이타스 ASCMO모델을 통해 시뮬레이션의 정확도와 품질을 크게 향상시킬 수 있습니다.