ETASのツールは、ソフトウェア開発者や機能開発者だけでなく、テストエンジニア、適合エンジニア、研究エンジニアが車載ソフトウェア開発のあらゆる段階において、ドメイン固有のアプリケーションに合わせ使用しています。その範囲は、ソフトウェアと制御ユニット(ECU)の統合から車載ECUの適合に至るまで多岐にわたります。さらに、MATLAB® および Simulink® ツールも、自動車業界では電子制御機能の開発、プラントのモデリング、タスクの最適化によく使用されています。
ETASでは、両ツールの利点をシームレスに統合できるよう、MATLAB®およびSimulink®とのインターフェースも幅広く提供しています。これらのインターフェースを活用すると、両ツール環境を使用するエンジニアは、それぞれの開発タスクに適したソリューションを利用できるようになります。
本ページでは、ETASツールが提供するMATLAB®/Simulink®インターフェースの概要について説明します。
機能開発、計測、適合

ETAS INCA-SIP – Simulink® 統合パッケージ
ETAS INCA-SIP – Simulink® 統合パッケージはお客様の Simulink®モデルの計測、適合、データ記録用にSimulink機能開発者に効率的で自動車に特化した環境を提供します。
INCAを使い、開発の期間、適合エンジニアの間で実験環境の設定やデータの記録を簡単に再利用することができます。シミュレーション中、INCA-SIPは、仮想XCPプロトコルにより MATLAB®/Simulink®をINCA に接続します。

ETAS INCA-MIP – MATLAB®統合パッケージ
エンジン制御機能の数学的最適化や計測・適合業務の自動化には、多くのユーザーがMATLAB®を利用しています。
ETAS INCA-MIP – MATLAB®統合パッケージはMATLAB® ツールボックスを使用してINCAコアシステムのさまざまな基本機能にアクセスできるINCAのアドオンソフトです。
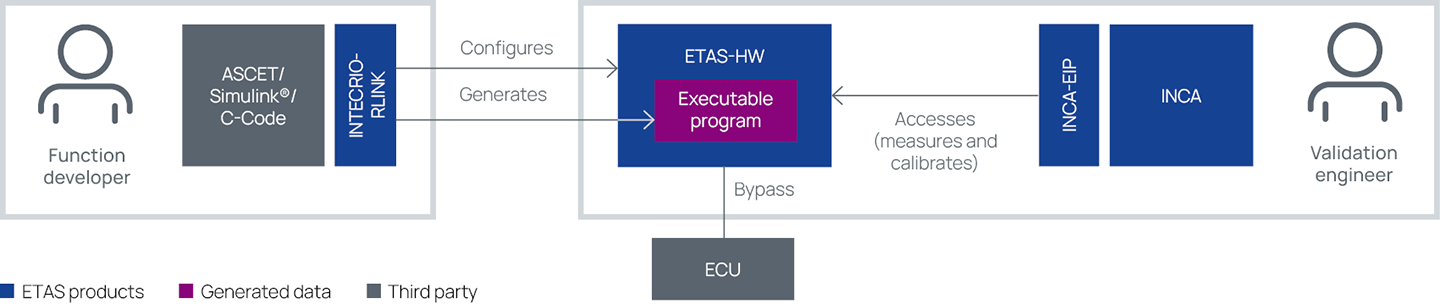
ETAS INTECRIO-RLINK – プロトタイピングブロックセット
ETAS INTECRIO-RLINK – プロトタイピングブロックセットは、実環境でのSimulink® ファンクションモデルのラピッドプロトタイピングを可能にします。本製品は、ETAS ES830ラピッドプロトタイピング製品およびES900プロトタイピングハードウェアファミリをサポートしています。INTECRIO-RLINKには、統合プロトタイピング環境ETAS INTECRIOと同じETASプロトタイピングハードウェア設定オプションが用意されています。
ファンクションプロトタイプは、高い実績を誇るバイパス技術を使って電子制御ユニット(ECU)に接続することができます。ETAS INCAソフトウェア製品を使用すると、Simulink®でモデル化された電子制御システムの車載システム検証を実行できます。
また、INTECRIO-RLINKを使用すれば、Simulink®環境を維持したまま作業できます。ETASのブロックセットを使用することで、ハードウェアの設定をSimulink®環境で行うことができます。
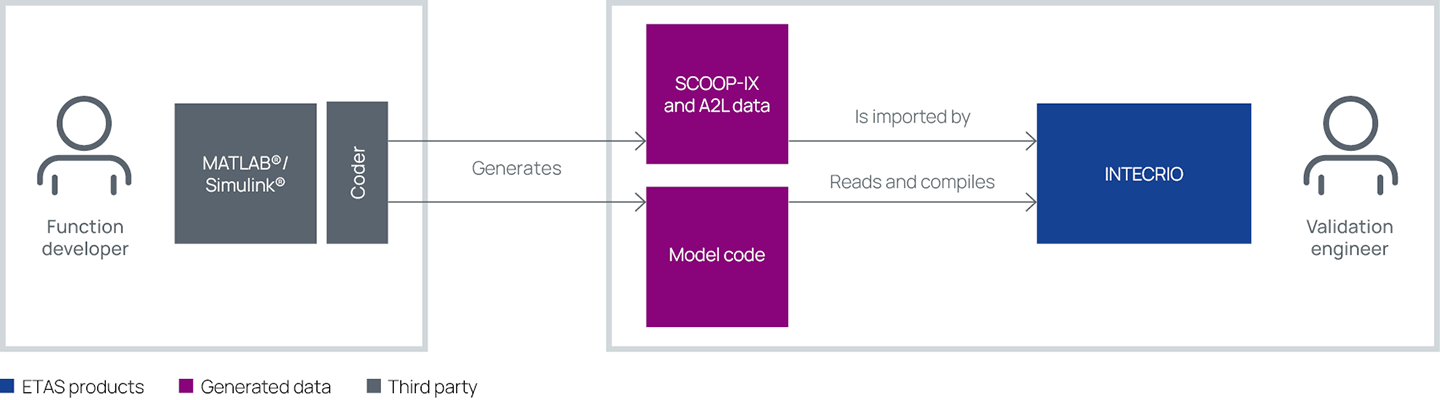
ETAS INTECRIO – 統合プロトタイピング環境
ETAS INTECRIOを使用すると、実環境PC上で自動車電子システムのプロトタイピングを行えるようになります。INTECRIOは、ラピッドプロトタイピングの実験環境、およびファンクションモデルやソフトウェアコンポーネントを統合するためのプラットフォームなどで構成されます。
ETAS INTECRIO統合プロトタイピング環境を使用すると、PC上や実環境で電子システムのプロトタイピングを実行できるようになります。MATLAB®/Simulink®モデルとETAS ASCETモデルの統合だけでなく、AUTOSARソフトウェアコンポーネントの統合もサポートしています。
車載テスト向けには、プロトタイピングモジュールES830や、ETAS ES900ハードウェアファミリのモジュールの他、さまざまなバイパス技術がサポートしています。INTECRIOのCOM APIを使用すると、複雑なプロセスも容易に自動化することができます。また、お客様固有の技術により、個々の使用事例に合わせてINTECRIOをさらに調整することも可能です。INCAソフトウェア製品では、最終テストを実際のハードウェアを使用して通常の方法で実施できるため、自動車機能のプロトタイピングを汎用性と柔軟性に優れた形で行うことができます。
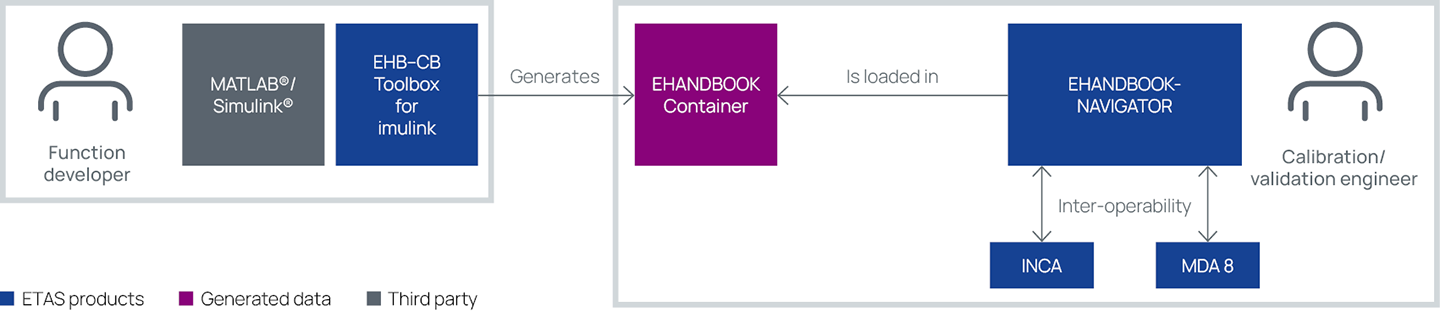
ETAS EHANDBOOK – ECUソフトウェア向けのインタラクティブなドキュメンテーション
EHANDBOOKは、ECUソフトウェア向けのインタラクティブなドキュメントを生成するためのソリューションで、MATLAB/Simulinkなどを使用してECUソフトウェアをモデルベースで開発する作業と、INCAやMDA 8などのETASツールを使用してECUソフトウェアを適合する作業とを連携させることができます。複数のECUファンクションのドキュメント生成のほか、アプリケーションソフトウェア全体のドキュメント生成が可能で、OEMメーカー、Tier 1サプライヤ、その他のサプライヤなど、複数の作成者により共同開発されたコンポーネントにも対応できます。
EHANDBOOK Container-Build Toolbox for Simulinkは、Simulink内からのワンクリックでのEHANDBOOKのコンテナ生成を実現します。制御ロジック開発者やソフトウェア開発者、適合エンジニアにインタラクティブなドキュメントを素早く提供することができます。この方法で生成したEHANDBOOKコンテナは、EHANDBOOK-NAVIGATOR(EHB-NAV)内で各種プロジェクトにシームレスに統合できます。
EHANDBOOK-NAVIGATORは、ECUファンクション内やECUファンクション間の依存関係を明確に視覚化します。複雑なECUソフトウェアを素早く理解でき、信号パスを容易に追跡できるため、貴重な工数の節約につながります。

ETAS EHOOKS – バイパスフック(スイッチングポイント)追加ツール
ETAS EHOOKS は、ECUソフトウェアにバイパスフックを簡単に追加できるツールです。 EHOOKSは、HEXデータおよびA2L ECU記述ファイルからの情報のみを使用します。
Simulink®統合パッケージを使用すると、Simulink®内からECU HEXファイルの構築と自動ビルドを行うことができます。そのため、オンターゲットバイパス実験用のSimulink®モデルをECUソフトウェアに容易に統合することができます。プロセスの制御はSimulink®内でのみ行われるため、ビルドプロセスはシンプルです。
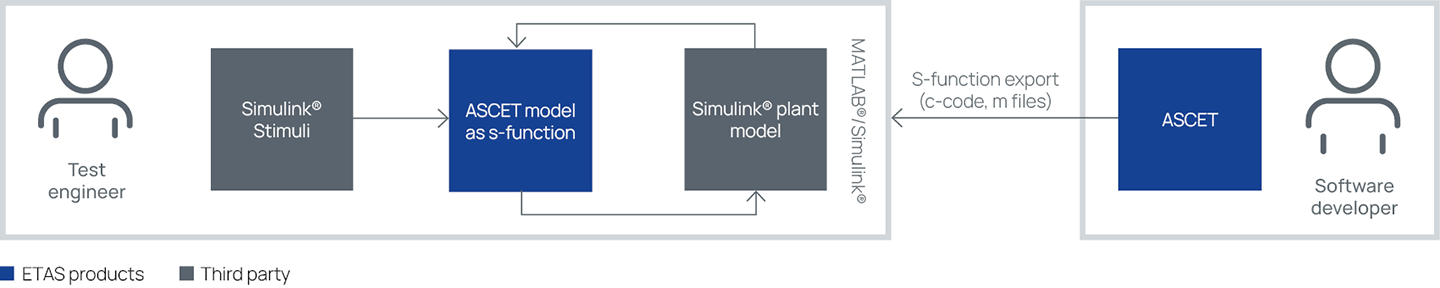
ETAS ASCET – モデルベースソフトウェア開発
MATLAB®およびSimulink®と併用すれば、ソフトウェア開発者は(ETAS ASCETを使用して生成された)コードを持つ特定のモデルをシミュレートおよびテストすることができます。そのため、ASCETではS-functionエクスポート機能を提供しており、MATLAB®で適切にコード処理を行えるようにしています。これにより、開発者はETAS ASCETとSimulink®の固有の利点を活用しつつ、ECUソフトウェアやECUファンクションの物理的挙動をモデリングすることができます。そのため、たとえばASCET-DEVELOPERで物理的コントローラ機能を開発し、MATLAB®にエクスポートすることが可能です。MATLAB®では、これらを経路、車両、およびドライバーモデルと連動させてシミュレートすることができます。
データに基づいたモデリングと最適化
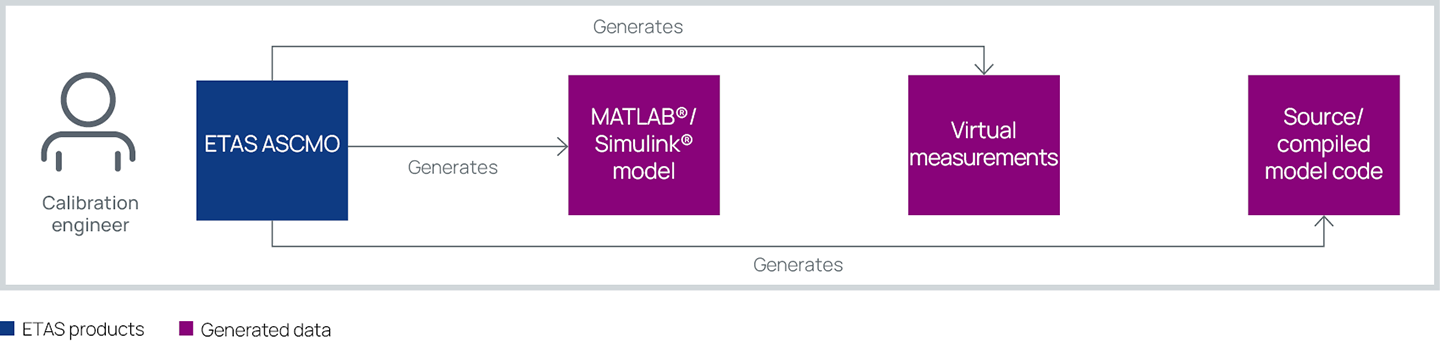
ETAS ASCMO – 複雑なシステム挙動を正確に予測
ETAS ASCMO を使用すると、最小限の計測データから高精度のプラントモデルを作成することができます。
ETAS ASCMOでは計測データをベースとしているため、複雑なシステム挙動を高精度な数理モデルとして体系化し、仮想的な計測を行うことができます。そのため、極めて複雑なシステム挙動でも、パラメータ設定なしで迅速かつ容易にモデリングを行うことが可能です。
この高精度なETAS ASCMOモデルは、マウスをワンクリックするだけでSimulink®にエクスポートでき、Simulink CoderTMを使用してコード生成を行う場合のコンポーネントとして使用することができます。高精度のETAS ASCMOモデルを使用すれば、シミュレーションの精度と速度を同時かつ大幅に向上させることができます。