ETAS-Werkzeuge werden von Software- und Funktionsentwicklern, Test-, Applikations- und Versuchsingenieuren für domänenspezifische Aufgaben in allen Phasen der Fahrzeugsoftwareentwicklung eingesetzt. Das reicht von der Integration von Software und Steuergeräten bis hin zur Applikation der Steuergeräte im Fahrzeug. Darüber hinaus werden aber auch die Werkzeuge MATLAB® und Simulink® zur Entwicklung von elektronischen Steuerungs- und Regelungsfunktionen, zur Modellierung der Regelstrecke sowie für Optimierungsaufgaben eingesetzt.
Um die Vorzüge beider Werkzeuglandschaften nahtlos miteinander zu verknüpfen, bietet ETAS ein breites Spektrum an Schnittstellen zu MATLAB® und Simulink® an. Mithilfe dieser Schnittstellen lassen sich für Ingenieure, die in beiden Werkzeugwelten arbeiten, für die jeweilige Entwicklungsaufgabe geeignete Lösungen darstellen.
Die Informationen auf dieser Seite geben einen Überblick über die MATLAB®/Simulink®-Schnittstellen der ETAS-Werkzeuge.
Funktionsentwicklung, Messen und Kalibrieren

ETAS INCA-SIP – Simulink® Integration Package
ETAS INCA-SIP – Simulink® Integration Package stellt Funktionsentwicklern die effiziente und automotivespezifische INCA-Umgebung zum Messen, Kalibrieren und zur Aufzeichnung der Daten von Simulink-Modellen zur Verfügung.
Applikationsingenieure nutzen ETAS INCA-Softwareprodukte, um während des Entwicklungsprozesses Experimente und Datensätze einfach wiederverwenden und untereinander austauschen zu können. Während der Simulation verbindet INCA-SIP MATLAB®/Simulink® und INCA virtuell mithilfe des XCP-Protokolls.

ETAS INCA-MIP – MATLAB® Integration Package
MATLAB® wird häufig zur Optimierung von Funktionen der Motorsteuerung mithilfe mathematischer Algorithmen sowie zur Automatisierung von Mess- und Kalibrieraufgaben verwendet.
ETAS INCA-MIP – MATLAB® Integration Package ist ein Add-on zu INCA, welches den Zugriff auf eine Vielzahl von Grundfunktionen des INCA-Kernsystems mittels MATLAB®-Toolbox ermöglicht.
ETAS INTECRIO-RLINK – Prototyping Blockset
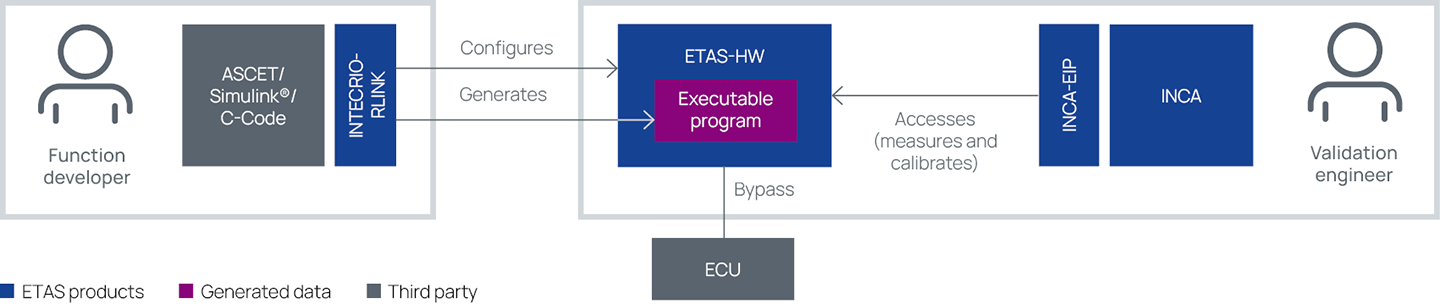
Das ETAS INTECRIO-RLINK – Prototyping Blockset ermöglicht das Rapid Prototyping von Simulink®-Funktionsmodellen in realen Umgebungen. Es unterstützt das ETAS ES830 Rapid-Prototyping-Modul und die Prototyping-Hardware-Familie ES900. INTECRIO-RLINK bietet dieselben Optionen für die Konfiguration von ETAS Prototyping-Hardware wie die Integrierte Prototypingumgebung ETAS INTECRIO.
Funktionsprototypen können mit Steuergeräten unter Verwendung der bewährten Bypasstechnologie verbunden werden. ETAS INCA-Softwareprodukte ermöglichen es dem Anwender anschließend, die in Simulink® modellierte elektronische Steuerung im Fahrzeug zu überprüfen.
INTECRIO-RLINK erlaubt es dem Nutzer, in seiner Simulink®-Umgebung zu bleiben. Zur Konfiguration mit der Hardware stehen ihm mehrere ETAS-Blocksets zur Verfügung.
ETAS INTECRIO – Integrierte Prototyping-Umgebung
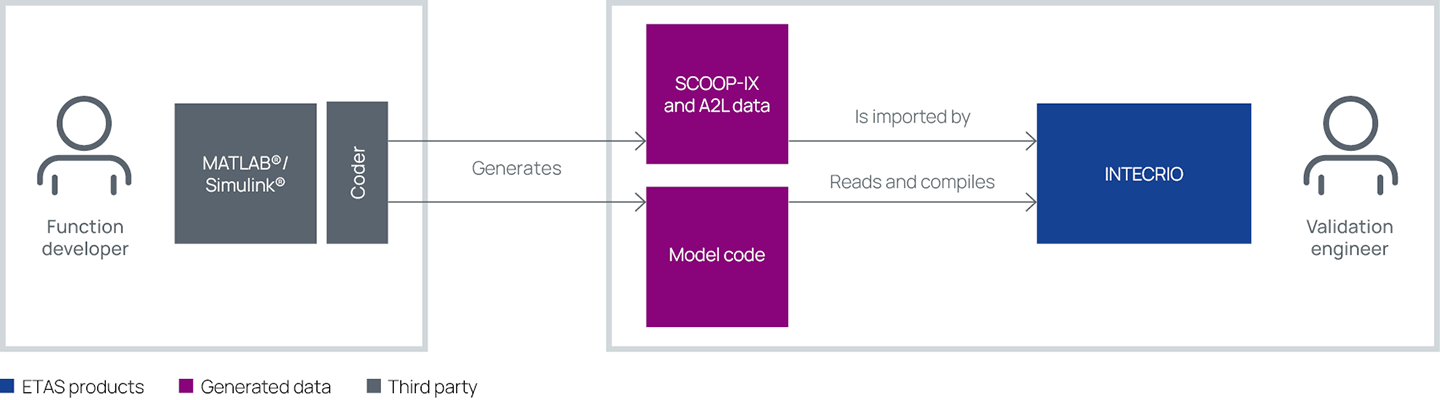
ETAS INTECRIO wird zum Prototyping von elektronischen Systemen im Fahrzeug eingesetzt. Bestandteile von INTECRIO sind eine Rapid-Prototyping-Experimentierumgebung sowie eine Plattform für die Integration von Funktionsmodellen und Softwarekomponenten.
Das Integrated Prototyping Environment ETAS INTECRIO wird zum Prototyping von elektronischen Systemen auf dem PC und in der realen Umgebung eingesetzt. Es unterstützt die Integration von MATLAB®-/Simulink®- und ETAS ASCET-Modellen sowie von AUTOSAR-Softwarekomponenten.
Für Fahrzeugversuche werden das Prototyping-Modul ES830, beziehungsweise die Module der ETAS-Hardware-Familie ES900 sowie verschiedenste Bypass-Technologien unterstützt. Mittels der COM-API von INTECRIO ist eine einfache Automatisierung selbst komplexer Abläufe möglich. Darüber hinaus lässt sich INTECRIO durch kundenspezifisches Engineering weiter an individuelle Anwendungsfälle anpassen. INCA-Softwareprodukte erlauben, wie gewohnt, das finale Testen mit echter Hardware. Dadurch wird sichergestellt, dass sich Fahrzeugfunktionen universell und flexibel prototypisieren lassen.
ETAS EHANDBOOK – Interaktive Dokumentation für Steuergerätesoftware
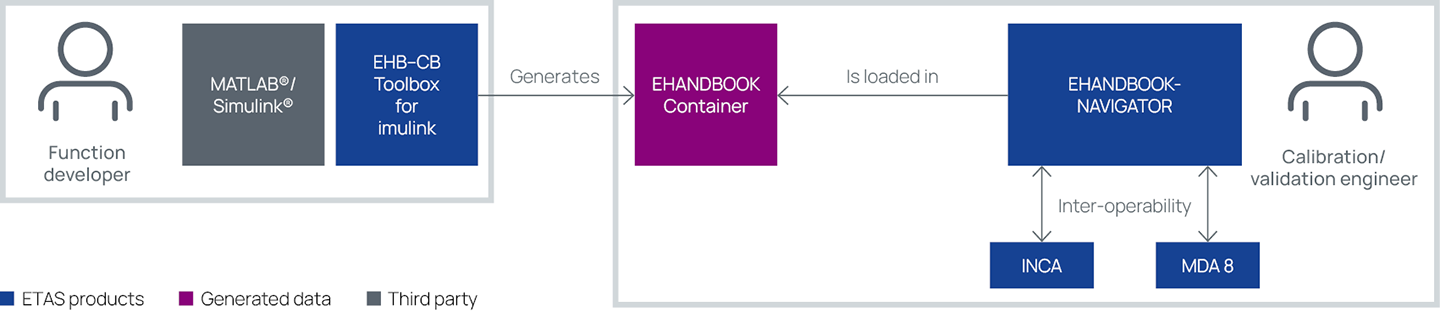
EHANDBOOK ist eine Lösung zur interaktiven Dokumentation von Steuergerätesoftware. Sie verknüpft die modellbasierte Entwicklung der Steuergerätesoftware (zum Beispiel mit MATLAB/Simulink) mit der Applikation der Steuergerätesoftware mithilfe von ETAS-Tools wie INCA und MDA 8. EHANDBOOK kann dabei mehrere Steuergerätefunktionen bis hin zur gesamten Anwendungssoftware dokumentieren, egal ob sie von OEMs, Tier-1s, weiteren Zulieferern oder einer Kombination aus all diesen erstellt worden sind.
Um EHANDBOOK-Container mit nur einem Knopfdruck direkt aus Simulink generieren zu können, steht die EHANDBOOK Container-Build Toolbox für Simulink zur Verfügung. Somit steht Funktions- und Softwareentwicklern sowie Applikateuren sofort eine interaktive Dokumentation zur Verfügung. Die so generierten EHANDBOOK Container lassen sich in EHANDBOOK-NAVIGATOR (EHB-NAV) nahtlos zu einem Projekt zusammenstellen.
EHANDBOOK-NAVIGATOR vereinfacht das Verstehen komplexer Steuergerätesoftware und spart somit kostbare Arbeitszeit. Wesentliche Vorteile von EHANDBOOK-Navigator sind die transparente Darstellung der Abhängigkeiten innerhalb von und zwischen Steuergerätefunktionen und die einfache Verfolgung von Signalpfaden.

ETAS EHOOKS – Werkzeug zum Setzen von Freischnitten
ETAS EHOOKS ist ein einfach zu bedienendes Werkzeug, mit dem Steuergerätesoftware für Bypassanwendungen freigeschnitten werden kann. Zu diesem Zweck werden von EHOOKS ausschließlich HEX-Daten und Informationen aus A2L-Steuergerätebeschreibungsdateien verwendet.
Das im Lieferumfang enthaltene Simulink® Integration Package ermöglicht die Konfiguration und den automatisierten Build von HEX-Daten in Simulink®, sodass Simulink®-Modelle für On-Target-Bypassexperimente einfach in die Steuergerätesoftware integriert werden können. Dadurch, dass die Steuerung ausschließlich in Simulink® stattfindet, ist der Erstellungsprozess einfach.
ETAS ASCET – Modellbasierte Softwareentwicklung
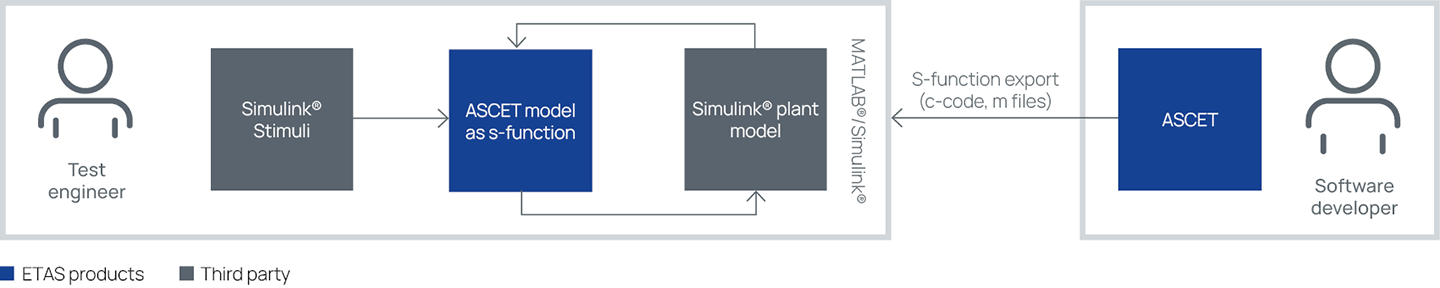
Damit der Softwareentwickler mit seinem mittels ETAS ASCET generierten Code zusammen mit MATLAB® und Simulink® bestimmte Modelle simulieren beziehungsweise testen kann, stellt ASCET mit dem S-Function-Export eine geeignete Möglichkeit bereit, den Code in MATLAB® weiterzuverarbeiten. Damit können die spezifischen Vorteile von ETAS ASCET und Simulink® bei der Modellierung von Steuergerätesoftware und dem physikalischen Verhalten von Steuergerätefunktionen genutzt werden. Beispielsweise können physikalische Reglerfunktionen mit ASCET-DEVELOPER entwickelt und nach MATLAB® exportiert werden. Anschließend können diese zusammen mit einer Strecke, einem Fahrzeug und dem Fahrermodell in MATLAB® simuliert werden.
Datenbasierte Modellierung und Optimierung
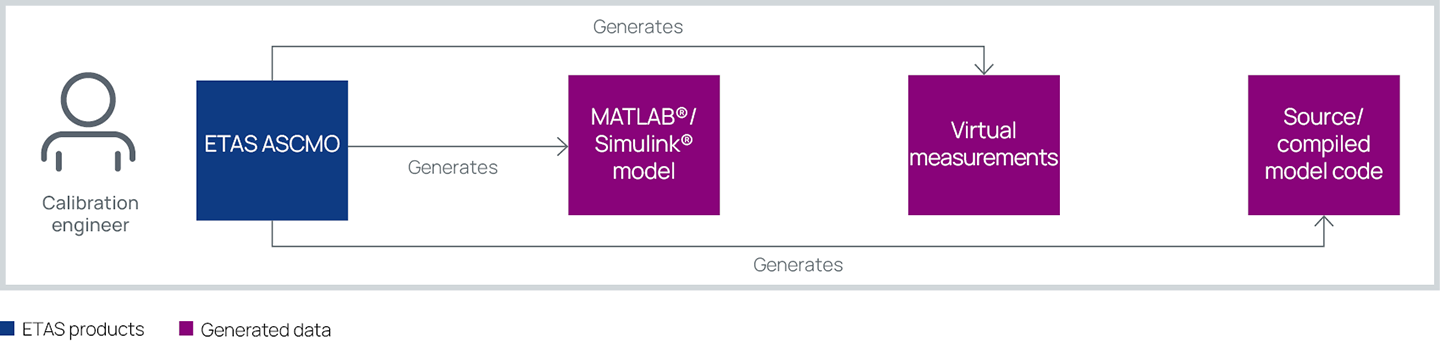
ETAS ASCMO – Genaue Vorhersage komplexen Systemverhaltens
ETAS ASCMO ermöglicht es dem Benutzer, datengetriebene Modelle von Regelstrecken mit sehr hoher Qualität zu erstellen.
Basierend auf Messdaten liefert ETAS ASCMO genaue mathematische Modelle komplexen Systemverhaltens, an denen sich virtuelle Messungen durchführen lassen. Damit bietet die Software eine schnelle und einfache Möglichkeit, selbst komplexestes Systemverhalten ohne Parametrierungen zu modellieren.
Die genauen ETAS ASCMO-Modelle können mit einem Mausklick nach Simulink® exportiert werden, wo sie als Bestandteile bei der Generierung von Code mit Simulink CoderTM verwendet werden können. Gleichzeitig lassen sich mithilfe der datengetriebenen ETAS ASCMO-Modelle die Simulationsgenauigkeit und die Simulationsgeschwindigkeit deutlich erhöhen.