ETAS RTA-LWHVR(轻量级Hypervisor)使得将ECU划分为单独的分区成为可能,即所谓的虚拟机(VM)。ETAS RTA-LWHVR内存要求低,存取速度快,专为汽车ECU的使用而优化。它是为除虚拟化硬件外的汽车微控制器设计的。
实现灵活的功能和软件开发
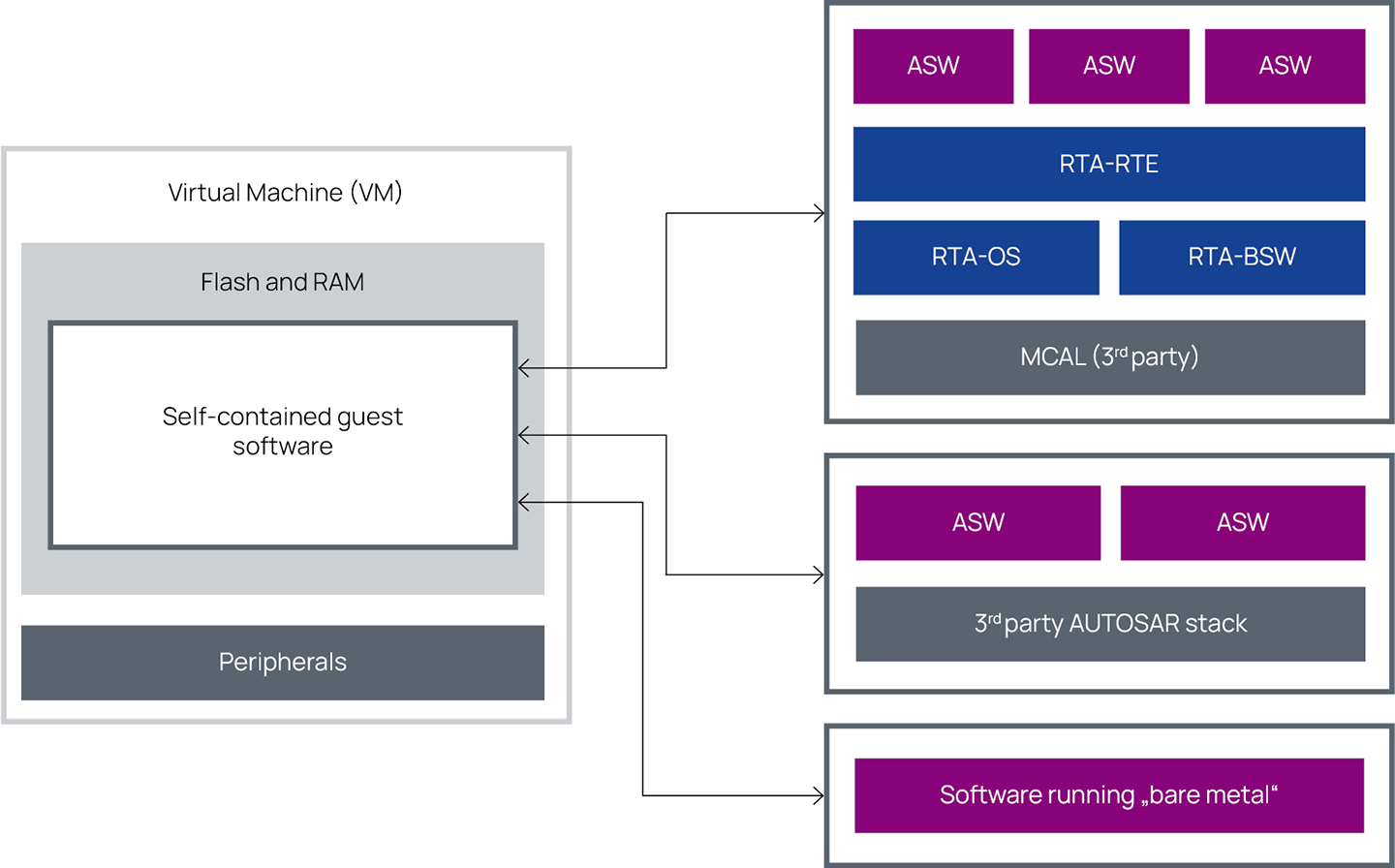
Hypervisor允许单个微控制器独立并行地运行多个虚拟机。每台机器可以裸机运行应用程序,也可以使用自己的操作系统(如RTA-OS),甚至可以使用完整的AUTOSAR堆栈(如RTA-CAR)。每个虚拟机都提供了底层硬件的抽象,这意味着在某些情况下,可以使用来自不同供应商的软件,只需进行最小的调整。
虚拟机之间严格解耦,并且在ECU上有自己的安全区域。这让独立更新VMs成为可能。因此,ETAS的轻量级Hypervisor构成了汽车行业敏捷软件和功能开发的基础。它将能够实现不同的供应商独立地开发相同的ECU,而不需要共享他们的软件代码。
Hypervisor还允许在同一个ECU上同时执行具有不同安全级别的AUTOSAR和非AUTOSAR兼容软件。主核心和多个应用核心之间相应的核心间通信(ICC)确保单个vm可以在需要时请求额外的时间预算。通过这种方式,可以准确地满足实时需求,并且不会影响其他功能的执行。
管理程序的一般好处
OEM希望通过减少ECU的数量来降低车辆成本。hypervisor通过将来自不同ECU的软件轻松集成到单个ECU中来帮助实现这一点。以这种方式使用虚拟机监控程序有以下好处:
- 不同供应商同时独立开发ECU
- 单个软件组件的集成工作量较低
- 发展伙伴之间的知识产权保护
- 通过功能的相互影响防止软件错误
- 认证支持,其中软件的一部分必须保持不变
当今的许多汽车微控制器都没有虚拟化硬件。为了满足AUTOSAR对汽车微控制器的需求,ETAS开发了轻量级的Hypervisor RTA-LWHVR。
RTA-LWHVR–适用于当下没有虚拟化支持的微控制器
轻量级Hypervisor提供了Hypervisor的大部分特性和由此带来的好处,而不需要硬件虚拟化支持。因此,RTA-LWHVR提供了广泛的操作领域。
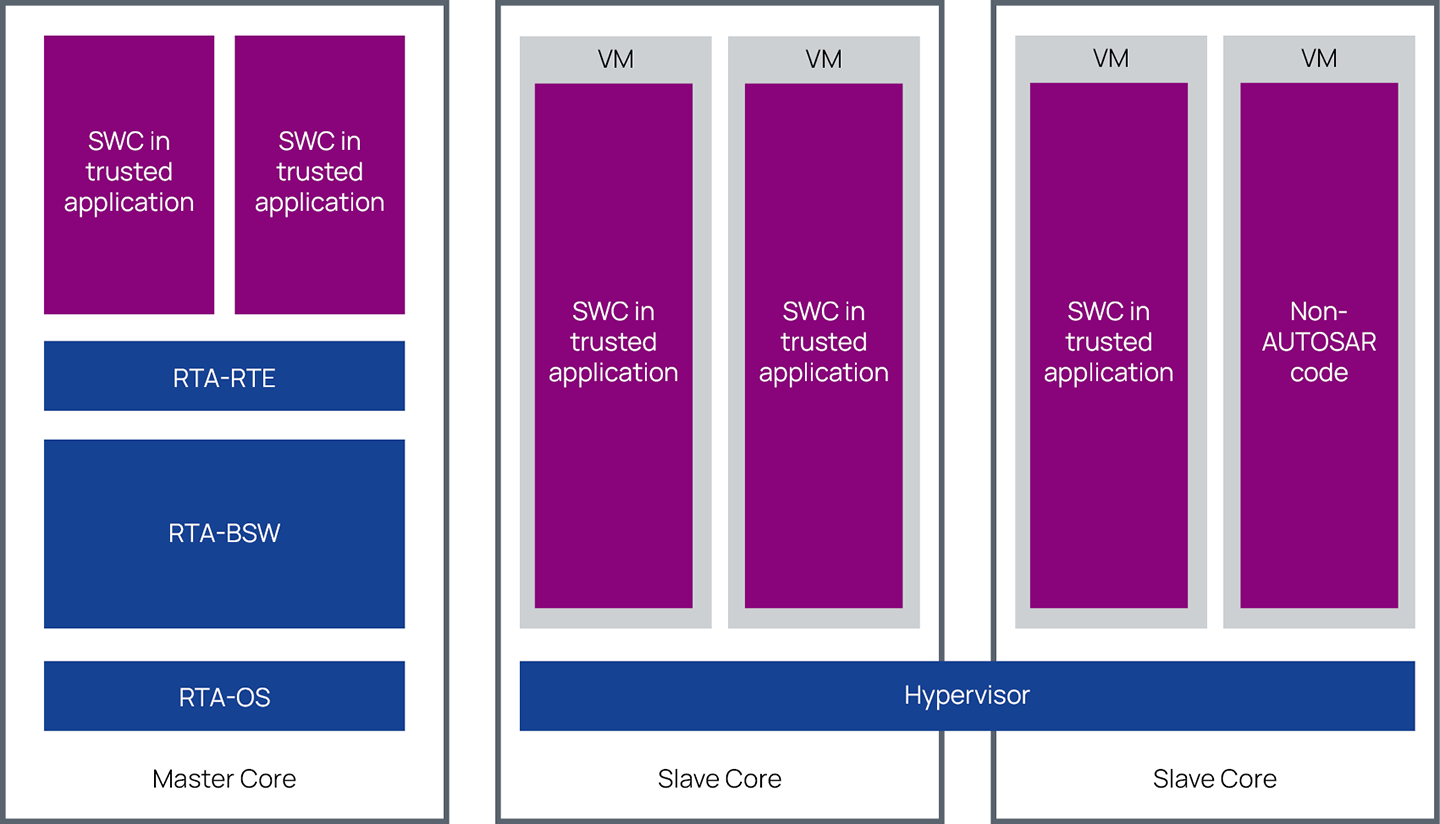
使用ETAS轻量级Hypervisor,只有第1层应用程序需要控制硬件和进程中断。第1层代码在主内核上运行“裸机”并处理所有I/O。轻量级Hypervisor本身运行在从属内核上,只需要少量内存,低至5kB。“简单”虚拟机中的客户应用程序也运行在从属核心上。
特征
-
“简单”的虚拟机减轻了缺少硬件虚拟化支持的低效性
-
适用于符合ISO 26262 ASIL B的应用
好处
- 软件的最短访问时间
- 内存需求低
- 多种操作模式
- 虚拟机之间没有相互干扰
应用领域
RTA-LWHVR最适合用于车身控制型应用和其他无硬实时要求的应用。
为了满足更高的要求和未来的微控制器,ETAS目前正在开发一个虚拟机监控程序RTA-HVR。更多详情请联系我们。