개발 초기 단계에서, Windows 데스크톱 PC (Model-in-the-Loop–MiL)를 통해 기능 테스트를 수행할 수 있습니다. 또한 COSYM은 MATLAB®/Simulink®, C 코드 또는 functional mock-up Interface 2.0 (예: Dymola 또는 GT-SUITE의 물리적 모델)과 같은 다양한 소스의 모델들의 통합을 지원합니다.
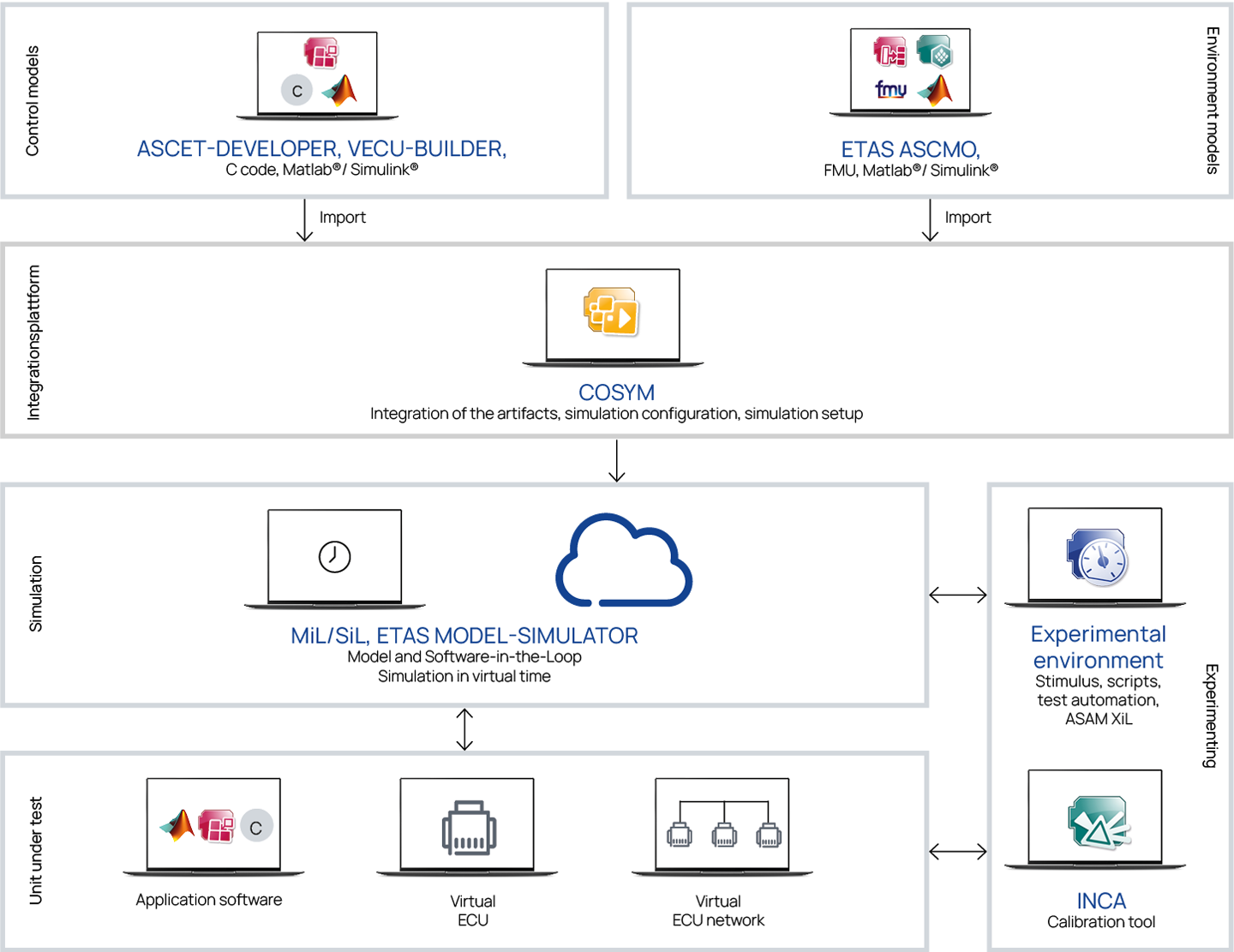
COSYM은 closed-loop 및 open-loop 테스트에 모두 사용될 수 있으며, discrete-time과 continuous-time 시스템을 시뮬레이션 할 수 있습니다. 특히 COSYM은 개방형 표준 (예: ASAM XiL, FMI 및 CDF)을 사용합니다. 예를 들어, ASAM XiL 인터페이스는 테스트 자동화 소프트웨어 솔루션의 연결을 용이하게 합니다. ASAM XiL 표준을 사용할 경우, 기존 테스트 라이브러리를 COSYM에서 활용할 수 있습니다.
SiL 테스트를 통한 비용·시간 대폭 단축
가상 ECU를 사용하는 경우, SiL (Software-in-the-Loop) 테스트에 COSYM을 이용할 수 있습니다. 같은 맥락에서, 가상 ECU는 가상 CAN/CAN FD bus에 연결될 수 있습니다. COSYM 아키텍처는 CAN과 같은 bus를 통한 통신이 전체 시스템과 동기화되어 시뮬레이션 되게 합니다.
SiL 테스트에 COSYM을 사용하면 다음과 같은 상당한 이점들을 얻을 수 있습니다.
- 보다 비용 효율적이며, 테스트 시간을 대폭적으로 단축
- 가상 ECU의 통합 및 테스트 지원
- 가상 ECU 간의 통신을 현실적으로 시뮬레이션하고 테스트에 사용
HiL사용을 위한 COSYM
COSYM은 또한LABCAR 제품군 (LABCAR 시스템)을 활용해 실시간 조건에서 주로ECU 테스트를 위한 Hardware-in-the-Loop 에 사용될 수 있습니다. 이 경우 MiL 및 SiL 사용을 위해 이미 생성된 모델, 매개 변수, 테스트 스크립트 등을 동일한 사용자 인터페이스에서 재사용할 수 있습니다.
이타스 COSYM의 GUI는 직관적입니다. COSYM은 다양한 결과물을 라이브러리에 통합합니다. 이러한 결과물은 시뮬레이션에서 차량의 EE 아키텍처 모델링이 가능하도록, 가상 bus 또는 신호를 통해 전체 시스템으로 통합됩니다.
또한 COSYM을 사용하면 시뮬레이션에서 스케줄링을 자유롭게 정의할 수 있습니다. . 전체적인 설정이 완료되면 로컬 Windows PC (Model-in-the-Loop/Software-in-the-Loop)를 실행 플랫폼으로 선택할 수 있습니다.
GUI를 통해 액세스할 수 있는 모든 기능은 COSYM REST-API 및 전용 프로그램 코드를 사용하여 실행될 수 있습니다. 이를 통해 무엇보다도 고객 개개인의 워크플로우에서 원활한 통합 (계속적인 통합)을 가능하도록 합니다.
COSYM EE 실험 환경은 시뮬레이션 및 실험을 제어하는데 사용됩니다. 이러한 통합 플랫폼과 실험 환경의 분리는 사용자 그룹의 작업에 맞춰 제작된 개별 사용자 그룹에 대한 명확한 제어 개념을 제공합니다.
MiL/SiL use case 와 관련하여, COSYM EE를 사용하는 대신 스크립트 기반으로 Python 인터페이스 또는 ASAM XIL 기반 테스트 자동화 툴을 통한 시뮬레이션 제어가 가능합니다.

MiL/SiL 활용사례
COSYM EE를 사용하여 Windows PC에서 시뮬레이션을 제어할 수 있습니다. COSYM 사용자 인터페이스를 사용하면 소프트웨어 모델 (예: MATLAB®/SIMULINK에서 시작)에서 시작해 거의 생산 가능한 ECU 소프트웨어 (C/C++ 인터페이스 사용)까지 다양한 추상화 단계에서 가상 ECU를 통합할 수 있습니다. 마찬가지로 이타스 ISOLAR-EVE, third-party 또는 고객 자체 솔루션을 사용하여 생성된 가상 ECU 모두 COSYM에 통합할 수 있습니다.
이타스 ISOLAR-EVE처럼 ECU 소프트웨어에 자동차 통신 bus 시스템 인터페이스가 장착되어 있으면, CAN 및 CAN FD 표준에 따라 여러 가상 ECU 간의 통신을 현실적으로 시뮬레이션 할 수 있습니다.
또 다른 장점은 이상적인 환경에서 달성할 수 있는 실시간 모델의 컴퓨팅 시간이 크게 단축된다는 것입니다. 이와 더불어 계산 집약적인 비실시간 모델도 계산 가능합니다.
COSYM 기본 제품
COSYM MiL SiL
COSYM MiL SiL은 Windows PC에서 시뮬레이션을 위해 C 코드, FMU 및 MATLAB®/Simulink® 모델의 통합과 구성을 가능하게 합니다.
COSYM 추가 기능
COSYM MiL SiL EE
COSYM MiL SiL EE는 실험 환경입니다. COSYM MiL SiL EE는 통합 모델을 기반으로 시뮬레이션 및 실험을 가능하게 합니다.
COSYM MiL SiL PA
COSYM MiL SiL PA는 시스템 모델 전체에서 파라미터의 자체 정의 가능 배열 및 그룹화를 가능하게 함으로써 모델의 파라미터화를 지원합니다. 이를 통해 쉽게 파라미터화가 가능한 애플리케이션별 뷰를 생성할 수 있습니다.
COSYM MiL SiL TC SIMULINK
COSYM MiL SiL TC SIMULINK를 사용하면 COSYM 모델과 MATLAB®/Simulink® 모델간의 공동 시뮬레이션이 가능합니다. MATLAB®/Simulink® 모델은 기존 환경에서 실행되므로 MATLAB®/Simulink®에서 생성된 코드가 필요하지 않습니다.
COSYM MiL SiL VNET
COSYM MiL SiL VNET 은 CAN, CANFD, AETH, LIN 및 FR 가상 bus의 시뮬레이션을 가능하게 해줍니다.
COSYM NIC
COSYM NIC (Network Integration CAN)는 CAN을 통해 rest-bus 시뮬레이션이 필요한 테스트를 구성 및 수행하는데 사용됩니다.
COSYM MIL SIL XCP
COSYM MIL SIL XCP 는 COSYM MIL SIL의 파라미터를 조정하고 INCA로 신호에 액세스할 수 있게 합니다.
COSYM-CAR
COSYM-CAR은 AUTOSAR를 기반으로 네트워크와 restbus 설정을 완성하는 툴입니다. 세부 설정 정보는 시뮬레이션 워크플로우를 계속할 수 있도록 COSYM과 호환되는 형식으로 제공 가능합니다.
클라우드를 위한 설계
새로운 배기가스 표준 (RDE) 준수 또는 자율주행 기능 개발을 위해서는 가상 도로 환경에서의 수많은 테스트가 필요합니다. 이는 모두 클라우드에서 대규모 병렬 계산을 사용해 허용 가능한 시간 내에만 구현될 수 있습니다. COSYM은 미래의 시뮬레이션 플랫폼입니다. COSYM은 확장 가능하며 모듈식 아키텍처를 기반으로 하기 때문에, 고객이 클라우드에서 테스트 및 작업할 수 있도록 최적의 상태를 유지해줍니다.