In the early development phase, functional tests can be performed on a Windows desktop PC (Model-in-the-Loop – MiL). COSYM furthermore supports the integration of models from a variety of sources, like MATLAB®/Simulink®, C code, or the Functional Mock-up Interface 2.0 (e.g. physical models from Dymola or GT-SUITE).
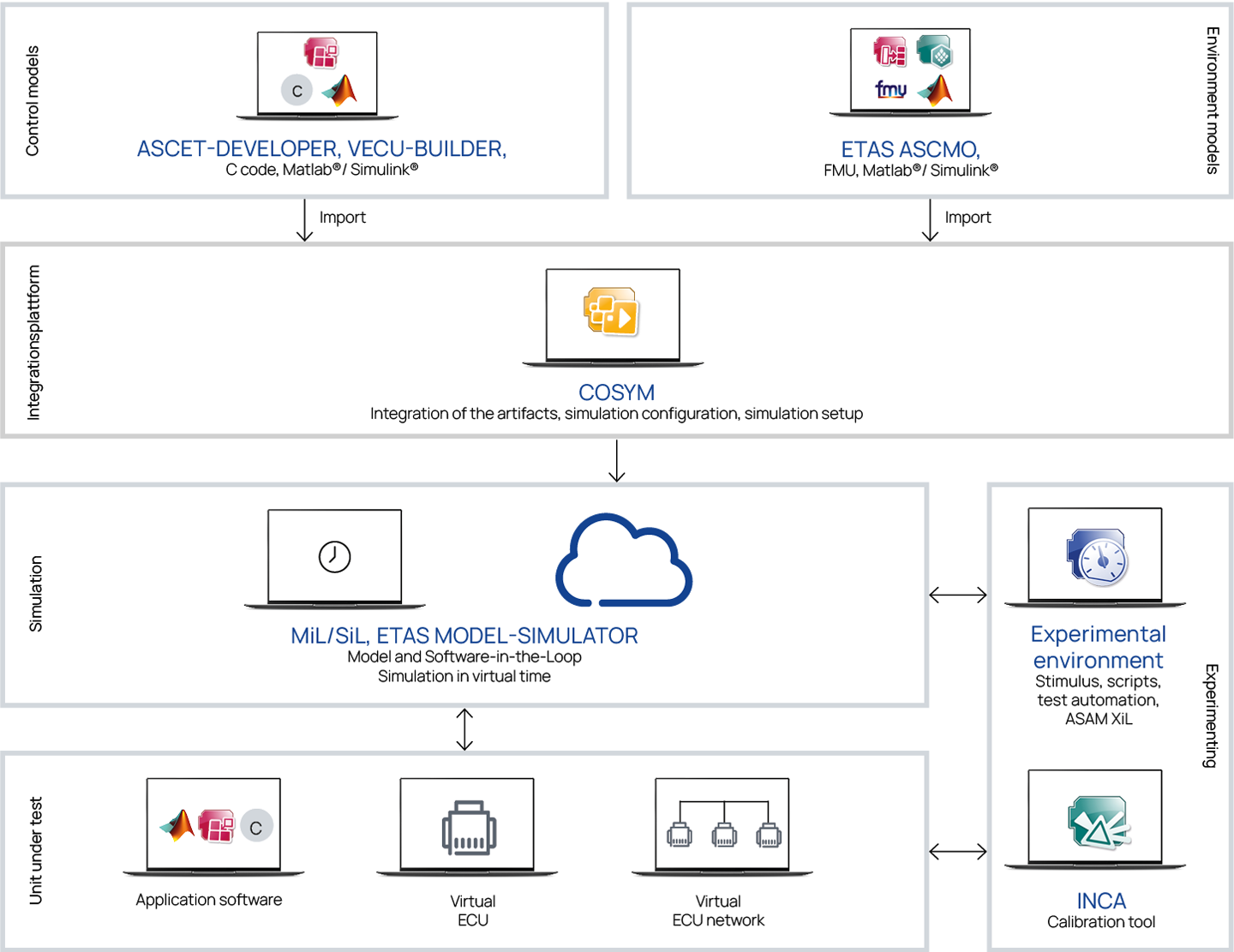
COSYM can be used for both closed-loop and open-loop testing, and it is possible to simulate discrete-time as well as continuous-time systems. COSYM specifically uses open standards (e.g. ASAM XiL, FMI, and CDF). Thus, the ASAM XiL interface, for instance, facilitates the connection of a test automation software solution. If the ASAM XiL standard is used, existing test libraries can then be utilized in COSYM.
More cost-effective and time-saving SiL tests
When using virtual ECUs, COSYM can be deployed for Software-in-the-Loop (SiL) tests. In this context, such ECUs can be connected to a virtual CAN/CAN FD bus. The COSYM architecture ensures that the communication via buses like CAN is simulated in sync with the overall system.
The use of COSYM for SiL tests provides significant benefits:
- More cost-effective and less time-consuming
- Enables the integration and testing of virtual ECUs
- Communication between virtual ECUs can be simulated realistically and used for tests
The graphical user interface (GUI) of ETAS COSYM is intuitive to use. COSYM allows a wide range of different artifacts to be integrated into a library. These artifacts can be combined into a complete system via virtual buses or signals, which makes it possible to model the E/E architecture of a vehicle in the simulation.
In addition, COSYM permits scheduling to be freely defined in the simulation. After creating the overall configuration, the local Windows PC (Model-in-the-Loop/Software-in-the-Loop) can be selected as the executing platform.
All functions that can be accessed using the graphical user interface can also be implemented using the COSYM REST-API and dedicated program code. This enables, among other things, seamless integration in customer-specific workflows (continuous integration).
The COSYM EE experiment environment is used to control the simulations and experiments. This separation of the integration platform and experiment environment offers clear control concepts for the respective user group that are tailor-made for the user group’s tasks.
When it comes to the MiL/SiL use case, the simulation can be controlled based on scripts via a Python interface or any ASAM XIL based test automation tool as an alternative to using COSYM EE.

MiL/SiL use case
COSYM EE can be used to control the simulation on a Windows PC. Using the COSYM user interface, it is possible to integrate virtual ECUs in different abstraction stages – starting from the software model (coming from e.g. MATLAB®/SIMULINK) to nearly production-ready ECU software (using a C/C++ interface). It is likewise possible to integrate virtual ECUs in COSYM that have been created with ETAS ISOLAR-EVE, that originate from third-party vendors, and that have been created using in-house solutions.
If, like ETAS ISOLAR-EVE, the ECU software is equipped with an interface for automotive bus systems, the communication between multiple virtual ECUs can be simulated realistically for the CAN and CAN FD standards.
Another big advantage is the significantly reduced computing time for real-time models achievable in ideal circumstances. In addition to this, it is of course also possible to calculate computationally intensive non-real-time models.
COSYM base products
COSYM MiL SiL
COSYM MiL SiL enables the integration and configuration of C code, FMU, and MATLAB®/Simulink® models for simulation on a Windows PC.
COSYM add-ons
COSYM MiL SiL EE
COSYM MiL SiL EE is an experiment environment. It makes it possible to perform simulations and experiments based on the integrated model.
COSYM MiL SiL PA
COSYM MiL SiL PA helps with the parameterization of models by enabling a self-definable arrangement and grouping of parameters across the models of the system. This allows application-specific views to be generated that make parameterization easier.
COSYM MiL SiL TC SIMULINK
COSYM MiL SiL TC SIMULINK enables co-simulation between models in COSYM and models in MATLAB®/Simulink®. No generated code is required from MATLAB®/Simulink®, since the MATLAB®/Simulink® models are executed in their original environment.
COSYM MiL SiL VNET
COSYM MiL SiL VNET enables the simulation of CAN, CANFD, AETH, LIN and FR virtual busses.
COSYM NIC
COSYM NIC (Network Integration CAN) is used for configuring and carrying out tests that require a rest-bus simulation with CAN.
COSYM MIL SIL XCP
COSYM MIL SIL XCP enables the manipulation of parameters in COSYM MIL SIL and the access on the signals with INCA.
COSYM-CAR
COSYM-CAR is a tool to complete the network and restbus configuration, based on AUTOSAR. Configuration details can be provided in the format compatible to COSYM to be able to continue with the simulation workflow.
Designed for the cloud
Proof of compliance with new emission standards (Real Driving Emissions, RDE) or the development of autonomous driving functions require the intensive use of virtual road tests. These can only be implemented within an acceptable time frame by using massively parallel computation in the cloud. COSYM is the simulation platform of the future. Since COSYM is based on a scalable and modular architecture, it ensures customers are optimally prepared for testing and working in the cloud.