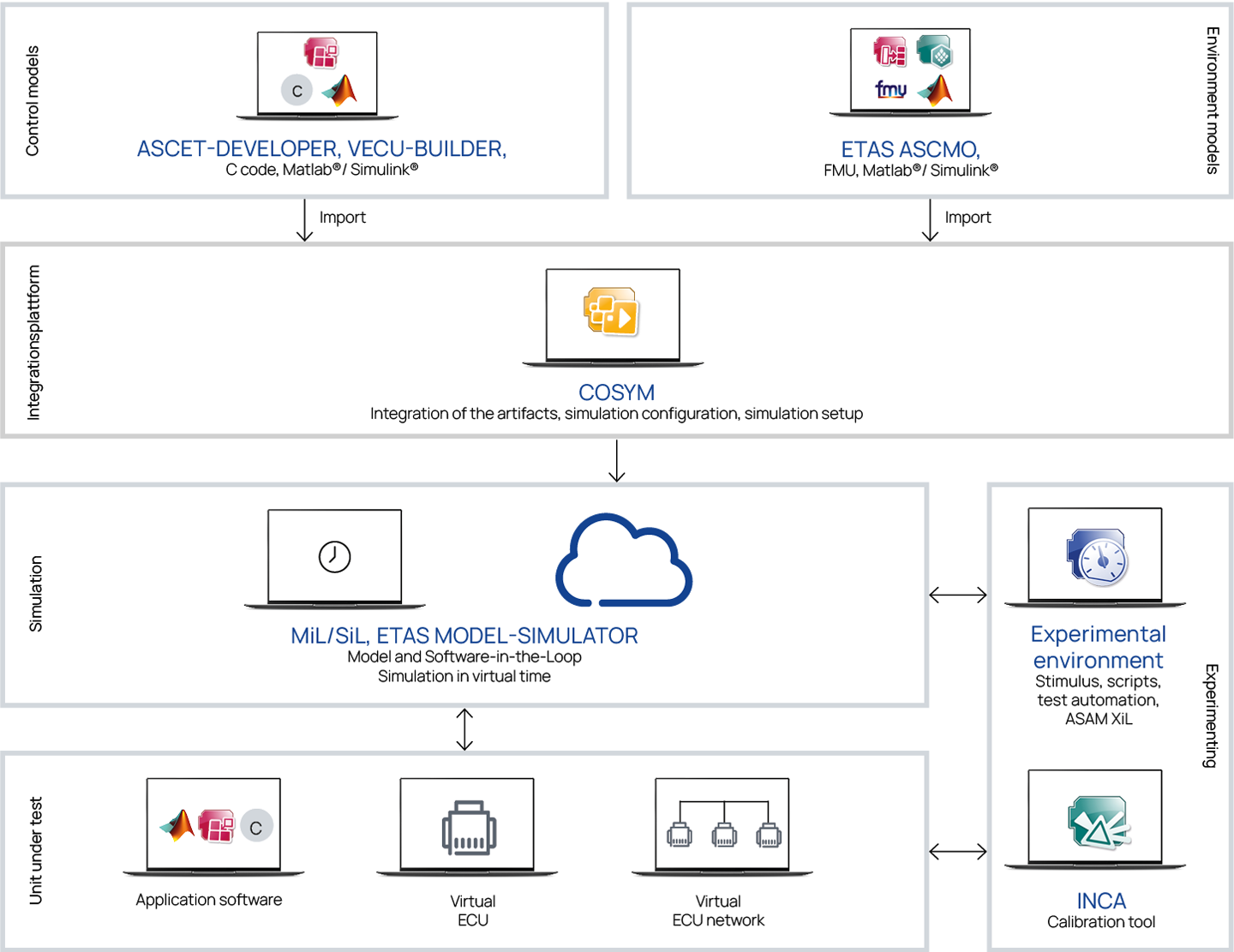
開発の早期の段階において、機能テストをWindowsデスクトップPC上で実行できます(Model-in-the-Loop:MiL)。COSYMは、MATLAB®/Simulink®、Cコード、Functional Mock-up Interface 2.0(DymolaやGT-SUITEの物理モデル)などの幅広いソースからのモデル統合もサポートしています。
COSYMは閉ループと開ループの両方のテストに対応しており、離散時間系および連続時間系のシミュレーションが可能です。COSYMは、特定のオープン規格(ASAM XiL、FMI、CDFなど)に対応しています。そのため、テスト自動化ソフトウェアソリューションをASAM XiLインターフェースなどを通じて容易に接続することができます。ASAM XiL規格を使用することで、COSYMで既存のテストライブラリを利用することが可能です。
SiLテストのコスト効率が向上し、テスト期間が短縮
バーチャルECUを使用すると、COSYM上でSiL(Software-in-the-Loop)テストを行うことができます。このような場合、CAN/CAN FDの仮想バスに対象のECUを接続すると、COSYMアーキテクチャによってCANなどのバスを介した通信がシステム全体と同期され、シミュレートされます。
SiL テストに COSYM を使用すると、大きな利点があります。
- コスト効率の向上と時間の短縮
- バーチャルECUを統合しテストすることが可能
- バーチャルECU間の通信を現実的にシミュレートし、テストに使用することが可能
ETAS COSYMのグラフィカルユーザーインターフェース(GUI)は直感的に使用することができます。また、COSYMでは、さまざまな成果物をライブラリに統合することが可能です。これらの成果物を仮想的なバスや信号によってシステム全体に組み込むことも可能なため、車両のEEアーキテクチャをシミュレーションによってモデリングできます。
シミュレーションでは、スケジューリングを自由に定義できます。また、設定全体を作成すれば、実行プラットフォームとしてローカルWindows PC(MiL/SiL)を選択できます。
さらに、GUIを使用してアクセスできるすべての機能は、COSYM REST-APIや専用のプログラムコードを使用して実装することもできます。これにより、お客様固有のワークフローをシームレスに統合することが可能です(連続統合)。
シミュレーションや実験の制御には、COSYM EE実験環境を使用できます。このように統合プラットフォームと実験環境を分離することにより、個々のユーザーグループをタスクごとに調整し、ユーザーグループの明確な制御コンセプトを確立することができます。
MiL/SiLの使用事例では、COSYM EEの代わりにPythonインターフェースまたはASAM XIL規格のテスト自動化ツールを使用することにより、スクリプトベースでシミュレーションを制御することが可能です。

MiL/SiLの使用事例
COSYM EEはWindows PC上でシミュレーションを制御する際にも使用できます。COSYMユーザーインターフェースを使用すると、(MATLAB®/SIMULINKなどで作成した)ソフトウェアモデルから(C/C++インターフェースを使用して)ほぼ量産段階になったECUソフトウェアに至るまで、さまざまな抽象化の段階でバーチャルECUを統合することが可能です。また、COSYM上でETAS ISOLAR-EVEによって作成されたバーチャルECU、サードパーティベンダー製のバーチャルECU、社内ソリューションを用いて作成したバーチャルECUも統合できます。
さらに、ETAS ISOLAR-EVEなど、車載バスシステム向けのインターフェースを備えたECUソフトウェアでは、複数のバーチャルECU間の通信をCANおよびCAN FD規格に合わせて現実的にシミュレートすることができます。
もう1つの大きな利点は、最適な環境でリアルタイムモデルの計算時間を大幅に短縮できることです。演算負荷の高い非リアルタイムモデルの計算も可能です。
COSYM基本製品
COSYM MiL SiL
COSYM MiL SiLでは、Windows PCでのシミュレーション向けのCコード、FMU、およびMATLAB®/Simulink®モデルを統合し設定することができます。
COSYMアドオン製品
COSYM MiL SiL EE
COSYM MiL SiL EEは実験環境であり、統合したモデルに基づいてシミュレーションや実験を行うことができます。
COSYM MiL SiL PA
COSYM MiL SiL PAは、モデルのパラメータ設定をサポートするツールであり、システムの全モデルでパラメータの配置やグループ化を自己定義できるようにします。これにより、アプリケーション固有のビューを生成できるようになるため、パラメータ設定が容易になります。
COSYM MiL SiL TC SIMULINK
COSYM MiL SiL TC SIMULINKを使用すると、COSYMのモデルおよびMATLAB®/Simulink®のモデル間で協調シミュレーションを行えるようになります。MATLAB®/Simulink®モデルは元の環境で実行できるため、MATLAB®/Simulink®からコードを生成する必要がありません。
COSYM MiL SiL VNET
COSYM MiL SiL VNET(Virtual Networks)を使用すると、CAN、CANFD、AETH、LINおよびFR仮想バスのシミュレーションを行うことができます。
COSYM NIC
COSYM NIC(Network Integration CAN)を使用すると、CANによるレストバスシミュレーションが必要なテストを設定し実行することができます。
COSYM MIL SIL XCP
COSYM MIL ISL XCPを使用すると、COSYM MIL SILのパラメータを操作し、INCAを用いて信号にアクセスすることがでます。
COSYM-CAR
COSYM-CARは、ネットワークおよびレストバスをAUTOSAR規格に沿って構成することができるツールです。COSYM対応のフォーマットで詳細な構成が提供されるため、シミュレーションワークフローを継続して利用することができます。
クラウド向けの設計
新しい排出基準(RDE)や自動運転機能の開発との適合性を証明するには、仮想的な路上テストを集中的に行う必要があります。これらのテストを許容時間内で実行するには、クラウドでの大規模な並列計算が不可欠です。COSYMは革新的なシミュレーションプラットフォームです。COSYMは拡張性に優れ、モジュール型のアーキテクチャをベースとしているため、クラウド上でのテストや作業に向けて最善の準備を整えることができます。