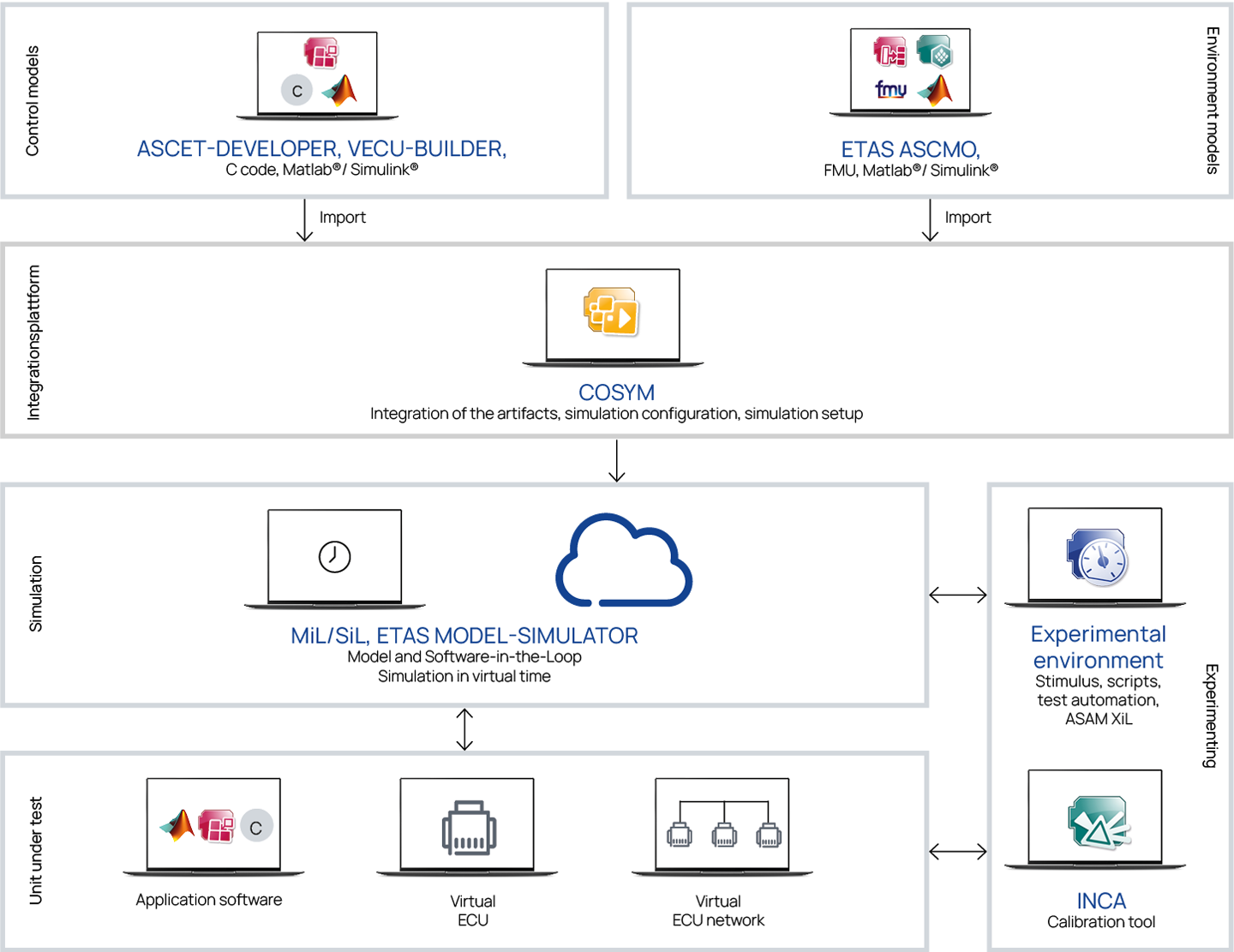
Im frühen Entwicklungsstadium können funktionale Tests auf einem Desktop-PC mit Windows durchgeführt werden (Model-in-the-Loop, MiL). Dabei unterstützt COSYM auch die Integration von Modellen aus unterschiedlichen Quellen wie MATLAB®/Simulink®, C-Code oder dem Functional Mock-up Interface 2.0 (beispielsweise physikalische Modelle aus Dymola oder GT-SUITE).
COSYM kann für Closed- und für Open-Loop-Tests gleichermaßen eingesetzt werden, wobei sowohl zeitdiskrete als auch zeitkontinuierliche Systeme simuliert werden können. COSYM setzt konsequent auf die Verwendung offener Standards (wie ASAM XiL, FMI, CDF). So erlaubt beispielsweise das ASAM-XiL-Interface die Ankopplung einer Testautomatisierungssoftware. Wird auf den ASAM-XiL-Standard zurückgegriffen, können vorhandene Testbibliotheken in COSYM genutzt werden.
Kostengünstigere und zeitsparende SiL-Tests
COSYM kann unter Verwendung virtueller Steuergeräte für Software-in-the-Loop (SiL)-Tests eingesetzt werden. Dabei können solche Steuergeräte mit einem virtuellen CAN/CAN-FD-Bus verbunden werden. Die Architektur von COSYM stellt sicher, dass die Kommunikation über Busse wie CAN zeitsynchron zum Gesamtsystem simuliert wird.
Die Verwendung von COSYM bei SiL-Tests bringt große Vorteile:
- Kostengünstiger und weniger zeitaufwendig
- Ermöglicht die Integration und das Testen virtueller Steuergeräte
- Kommunikation zwischen virtuellen ECUs kann realitätsnah simuliert und für Tests genutzt werden
Die grafische Bedienoberfläche (GUI) von ETAS COSYM erschließt sich intuitiv. COSYM erlaubt die Integration unterschiedlichster Artefakte in eine Bibliothek. Über virtuelle Busse oder Signale können diese Artefakte zu einem Gesamtsystem verbunden werden, was die Nachbildung der E/E-Architektur eines Fahrzeugs in der Simulation erlaubt.
Darüber hinaus erlaubt COSYM die freie Festlegung des Schedulings in der Simulation. Nach Erstellung der Gesamtkonfiguration kann der lokale Windows-PC (Model-in-the-Loop/Software-in-the-Loop) als Ausführungsplattform ausgewählt werden.
Alle Funktionen, die mit der grafischen Bedienoberfläche möglich sind, können auch mittels der COSYM REST-API und eines eigenen Programmcodes realisiert werden. Dies ermöglicht unter anderem die nahtlose Integration in kundenspezifische Workflows (Continuous Integration).
Für die Steuerung der Simulationen beziehungsweise Experimente wird die Experimentierumgebung COSYM EE eingesetzt. Diese Trennung von Integrationsplattform und Experimentierumgebung bietet für die jeweilige User-Gruppe übersichtliche und für deren Aufgaben maßgeschneiderte Bedienkonzepte.
Beim MiL-/SiL-Anwendungsfall kann alternativ zum Einsatz der COSYM EE die Simulation skriptbasiert über ein Python-Interface oder jedes ASAM XIL-basierte Testautomatisierungswerkzeug gesteuert werden.

MiL-/SiL-Anwendungsfall
Die Steuerung der Simulation kann auf einem Windows-PC das Add-On COSYM EE verwendet werden. Über die COSYM-Benutzeroberfläche können virtuelle Steuergeräte in unterschiedlichen Abstraktionsstufen integriert werden: angefangen beim Softwaremodell, das beispielsweise aus MATLAB®/SIMULINK stammt, bis hin zu einer seriennahen Steuergerätesoftware (mittels C/C++-Interface). Ebenso können virtuelle Steuergeräte in COSYM integriert werden, die mit ETAS ISOLAR-EVE erzeugt wurden, von Drittanbietern stammen und mit Inhouse-Lösungen erstellt wurden.
Verfügt die Steuergerätesoftware wie bei ETAS ISOLAR-EVE über ein Interface für automotive Bussysteme, kann auch die Kommunikation zwischen mehreren virtuellen ECUs realitätsnah für die Standards CAN und CAN FD simuliert werden.
Ein weiterer großer Vorteil ist im Idealfall die deutlich verkürzte Rechenzeit für echtzeitfähige Modelle. Darüber hinaus können natürlich auch nichtechtzeitfähige, rechenintensive Modelle kalkuliert werden.
COSYM Basis-Produkte
COSYM MiL SiL
ETAS COSYM MiL SiL ermöglicht die Integration und Konfiguration von C-Code-, FMU- und MATLAB®/Simulink®-Modellen zur Simulation auf einem Windows-PC.
COSYM Add-ons
COSYM MiL SIL EE
COSYM MiL SiL EE ist eine Experimentierumgebung. Sie ermöglicht das Simulieren und Experimentieren auf Basis des integrierten Modells.
COSYM MiL SiL PA
COSYM MiL SiL PA unterstützt bei der Parametrierung von Modellen, indem es eine selbst definierbare Anordnung und Gruppierung von Parametern über die Modelle des Systems hinweg erlaubt. Damit können anwendungsfallbezogene Sichten generiert werden, welche die Parametrierung erleichtern.
COSYM MiL SiL TC SIMULINK
COSYM MiL SiL TC SIMULINK ermöglicht die Co-Simulation zwischen Modellen in COSYM und Modellen in MATLAB®/Simulink®. Es ist keine Codegenerierung aus MATLAB®/Simulink® erforderlich, da die MATLAB®/Simulink®-Modelle in ihrer ursprünglichen Umgebung ausgeführt werden.
COSYM MiL SiL VNET
COSYM MiL SiL VNET (Virtual Networks) ermöglicht die Simulation von virtuellen CAN-, CANFD-, AETH-, LIN- und FR-Bussen.
COSYM NIC
COSYM NIC (Network Integration CAN) dient der Konfiguration und Durchführung von Tests, die eine Restbussimulation mit CAN erfordern.
COSYM MIL SIL XCP
COSYM MIL SIL XCP ermöglicht die Bearbeitung von Parametern in COSYM MIL SIL und den Zugriff auf die Signale mit INCA.
COSYM-CAR
COSYM-CAR ist ein Werkzeug zur Vervollständigung der Netzwerk- und Restbuskonfiguration, basierend auf AUTOSAR. Konfigurationsdetails können im COSYM-kompatiblen Format bereitgestellt werden, um mit dem Simulations-Workflow fortfahren zu können.
Für die Cloud entworfen
Der Nachweis der Einhaltung neuer Emissionsstandards (Real Driving Emissions, RDE) oder die Entwicklung autonomer Fahrfunktionen erfordern den intensiven Einsatz virtueller Fahrversuche. Diese können in akzeptabler Zeit nur durch eine massiv-parallele Berechnung in der Cloud umgesetzt werden. COSYM ist die Simulationsplattform der Zukunft. Weil COSYM auf einer skalierbaren und modularen Architektur basiert, sind Kunden optimal für das Testen und Arbeiten in der Cloud vorbereitet.