이러한 구성을 통해, ETK, FETK 및 XETK 개발 ECU는 추가적인 시리얼 인터페이스 없이 개발 툴로 연결할 수 있습니다. ECU에 대한 기능적, 물리적인 별도의 추가부속품으로서, ETK, FETK 및 XETK는 개발 ECU와 양산 ECU 사이의 직접적인 비교를 용이하게 합니다. ETK, FETK 및 XETK 개발 ECU를 사용하면 플랫폼 소프트웨어에 있는 드라이버를 변경할 필요 없이 양산 소프트웨어가 생산 ECU로 쉽게 캘리브레이션 및 검증될 수 있습니다.
병렬 및 직렬 ECU 인터페이스
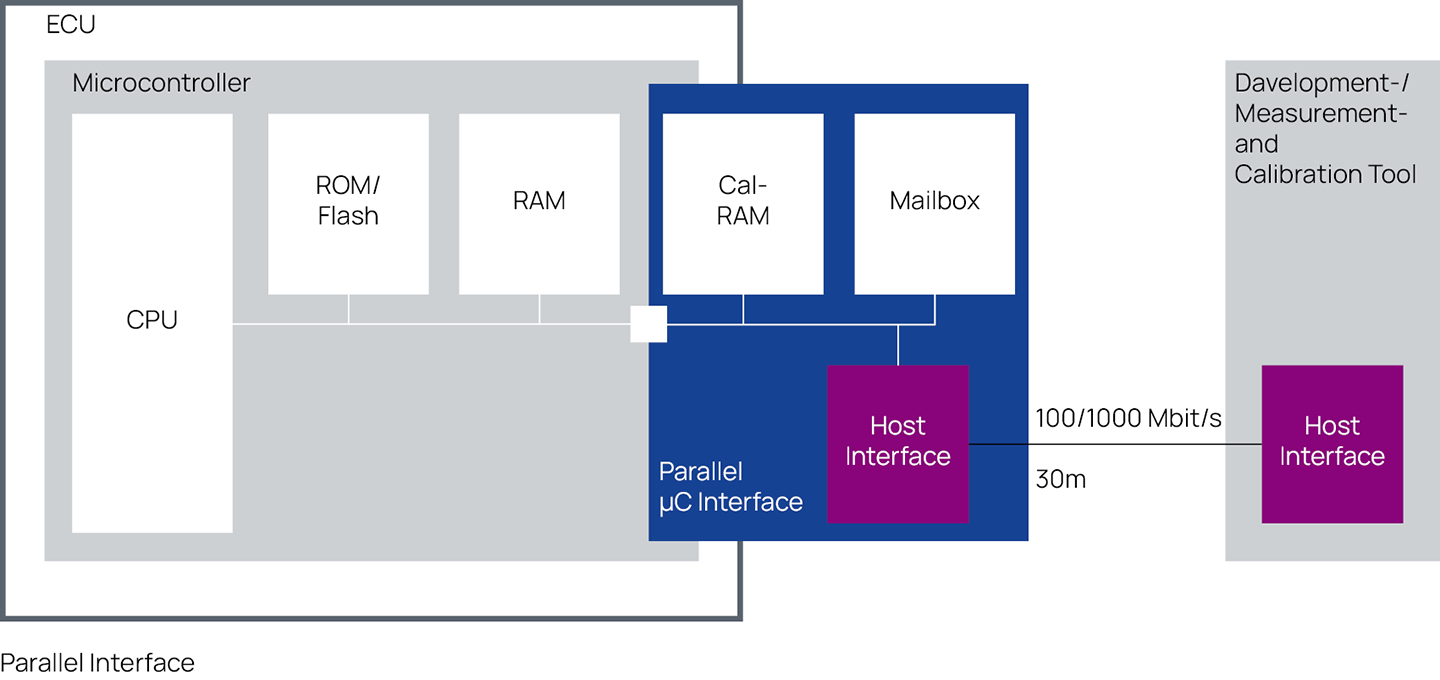
ECU의 비-휘발성 메모리 (플래시/ROM)에서 파라미터 또는 ECU 프로그램을 포함하고 있는 영역은 ETK, FETK 및 XETK (CalRAM)의 보드에 있는 RAM에 매핑됩니다. 이는 마이크로컨트롤러의 데이터/주소 bus를 이용하여 CalRAM에 접속하는 것입니다. 측정 및 실시간 적용을 위해, ETK, FETK 및 XETK와 마이크로컨트롤러 사이에서의 데이터 교환은 mailbox라는 중간 버퍼를 사용합니다. 여기서 ECU 프로그램의 트리거 신호에 기반한 데이터 동기화를 수행하게 됩니다. 캘리브레이션 툴의 연결은 최대 30미터까지 가능하며 100 Mbit/s (ETK/XETK) / 1000 Mbit/s (FETK) 이더넷 케이블로 구성됩니다.
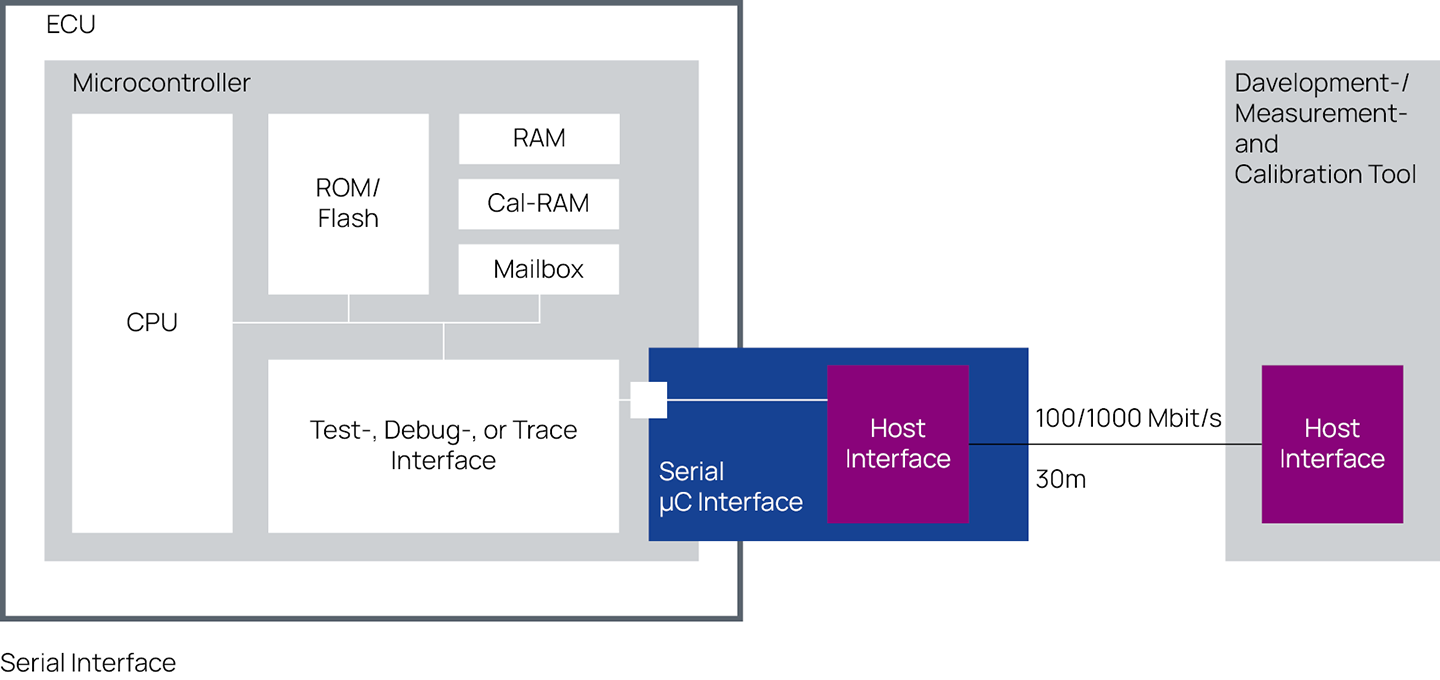
마이크로컨트롤러가 외부 데이터 및 주소 bus를 제공하지 않는 경우, 확장 메모리를 포함하여 마이크로컨트롤러 내부 메모리가 ECU 개발을 위해 사용됩니다. 테스트벤치 및 차량 내의 테스트에서, ETK, FETK 및 XETK 인터페이스는 JTAG, NEXUS 또는 AURORA와 같은 강력한 테스트, 디버깅, TRACE 인터페이스를 통해 원격으로 마이크로컨트롤러에 접근합니다.