ETK、FETK、XETKを搭載した開発用ECUは、その構造上、シリアルインターフェースを追加しなくても開発ツールに接続することができます。ETK、FETK、XETKは機能的にも物理的にも独立した形でECUに追加されるので、開発用ECUとそれに対応する量産ECUの挙動を直接比較するのも容易です。ETK、FETK、またはXETKを搭載した開発用ECU を用いると、連続生産ソフトウェアの適合をきわめて容易に行えるうえ、後に量産ECUを使用して検証を行う際にプラットフォームソフトウェアのドライバを変更する必要がありません。
パラレルおよびシリアルのECUインターフェース
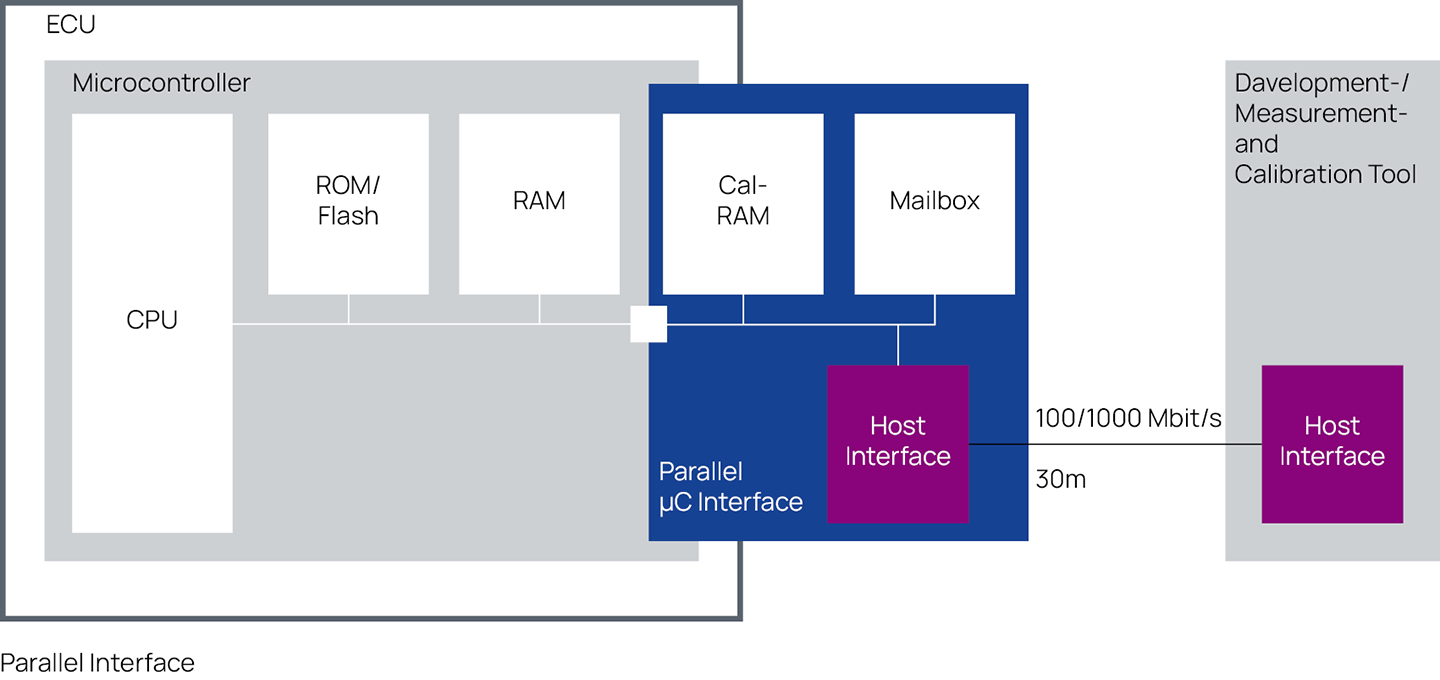
ECUの不揮発性メモリ(Flash/ROM)内のパラメータ定義データやECUプログラムが格納されている領域は、ETK、FETK、またはXETKに搭載されているRAM(CalRAM)にミラーリングされます。この処理は、マイクロコントローラのデータ・アドレスバス経由でCalRAMにアクセスして行われます。計測およびリアルタイムアプリケーションの場合、ETK / FETK / XETKとマイクロコントローラの間のデータ交換では、メールボックスが中間メモリとして使用され、ECUプログラムからのトリガ信号によりデータが同期されます。開発・適合ツールとの間は、長さが30メートル以内の100Mbit/s(ETK / XETK)または1000Mbit/s(FETK)のEthernetケーブルで接続されます。
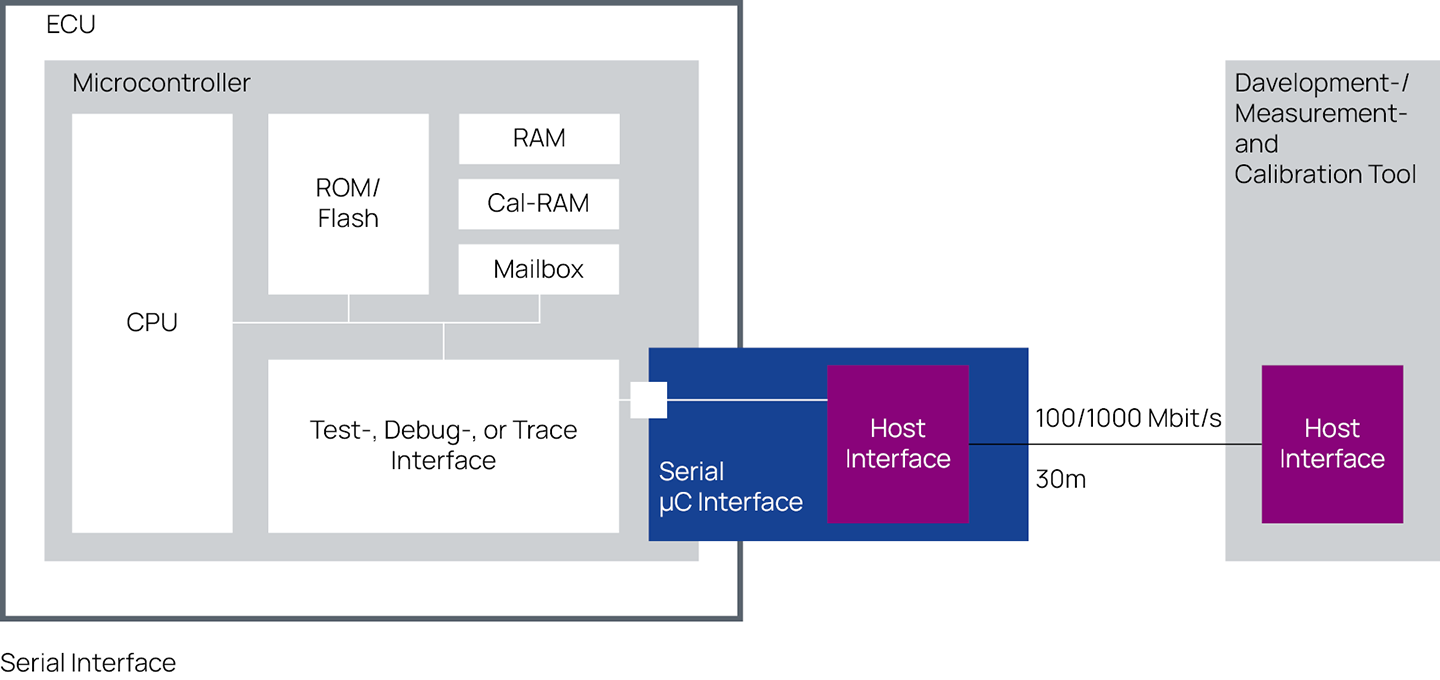
マイクロコントローラに外部データ・アドレスバスがないときは、多くの場合、拡張メモリを持つバリアントのマイクロコントローラを使用してECU開発を行います。テストベンチと車載のどちらのテストでも、ETK、FETK、またはXETKのインターフェースを使用すれば、JTAG、NEXUS、AURORAのような、強力なテスト、デバッグ、またはトレースインターフェースを通じて遠方のマイクロコントローラに容易にアクセスすることができます。アプリケーションでは、シリアルとパラレルの両方のECUインターフェースは同一と見なされ、ECUに依存しないものと見なされます。