Konstruktionsbedingt benötigen ETK-, FETK- und XETK-Entwicklungssteuergeräte keine zusätzlichen seriellen Schnittstellen für die Kommunikation mit dem Entwicklungswerkzeug. Als funktional und physikalisch vom Steuergerät getrennte Einheit ermöglichen ETKs, FETKs und XETKs den direkten Vergleich zwischen dem Verhalten des Entwicklungssteuergerätes und dem Serienstand. Mit einem ETK/XETK-Entwicklungssteuergerät kann Seriensoftware einfach kalibriert und mit dem Seriensteuergerät überprüft werden, ohne dass Treiber in der Plattform-Software gewechselt werden müssen.
Parallele und serielle Steuergeräteschnittstelle
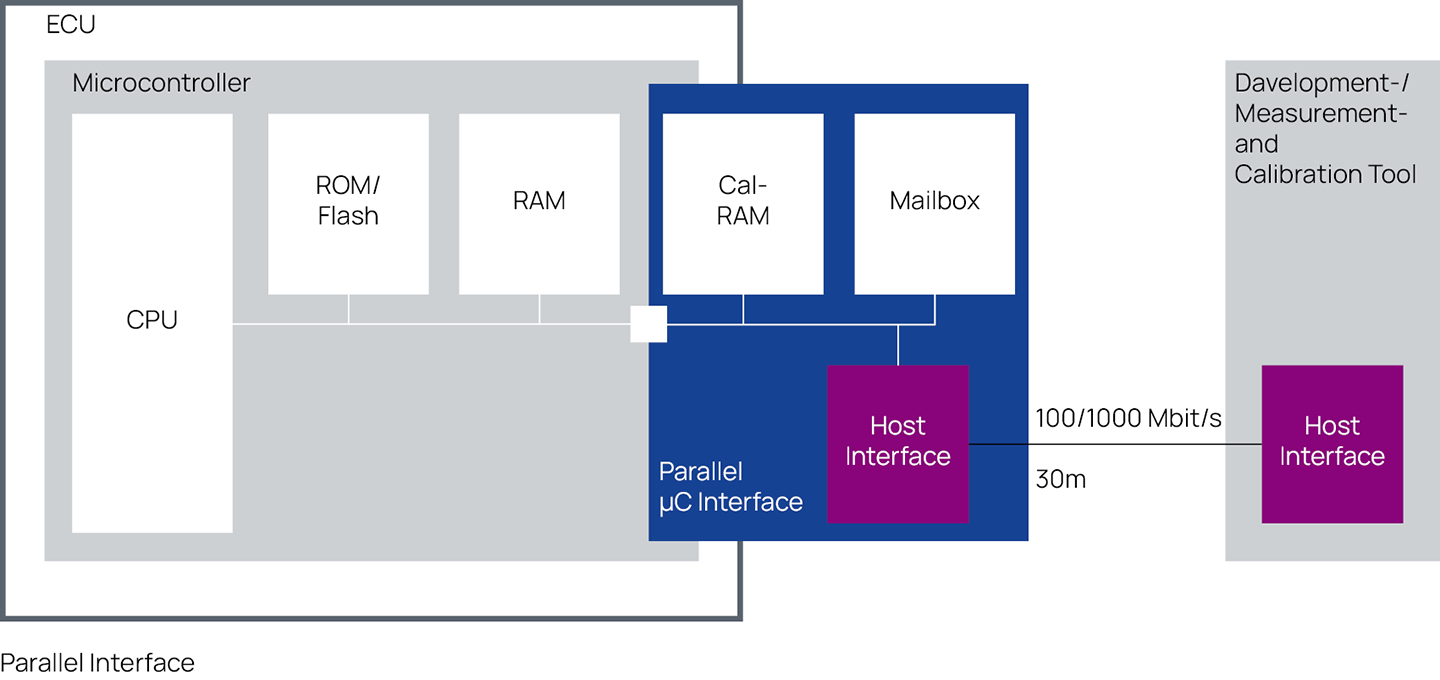
Bereiche im nichtflüchtigen Speicher (Flash/ROM) des Steuergeräts, welche Parameterdaten und/oder das Steuergeräteprogramm enthalten, werden im RAM des ETK, FETK oder XETK nachgebildet (CalRAM). Hierzu wird das CalRAM über den Daten-/Adressbus des Mikrocontrollers angebunden. Bei Messungen und Echtzeitanwendungen geschieht der Austausch von Daten zwischen ETK, FETK, XETK und Mikrocontroller über einen Zwischenspeicher (Mailbox). Dazu werden die Daten über Trigger vom Steuergeräteprogramm synchronisiert. Die Anbindung an Entwicklungs- und Applikationswerkzeuge geschieht über eine 100 Mbit/s (ETK/XETK) / 1000 Mbit/s (FETK) Ethernetleitung, die bis zu 30 m lang sein kann.
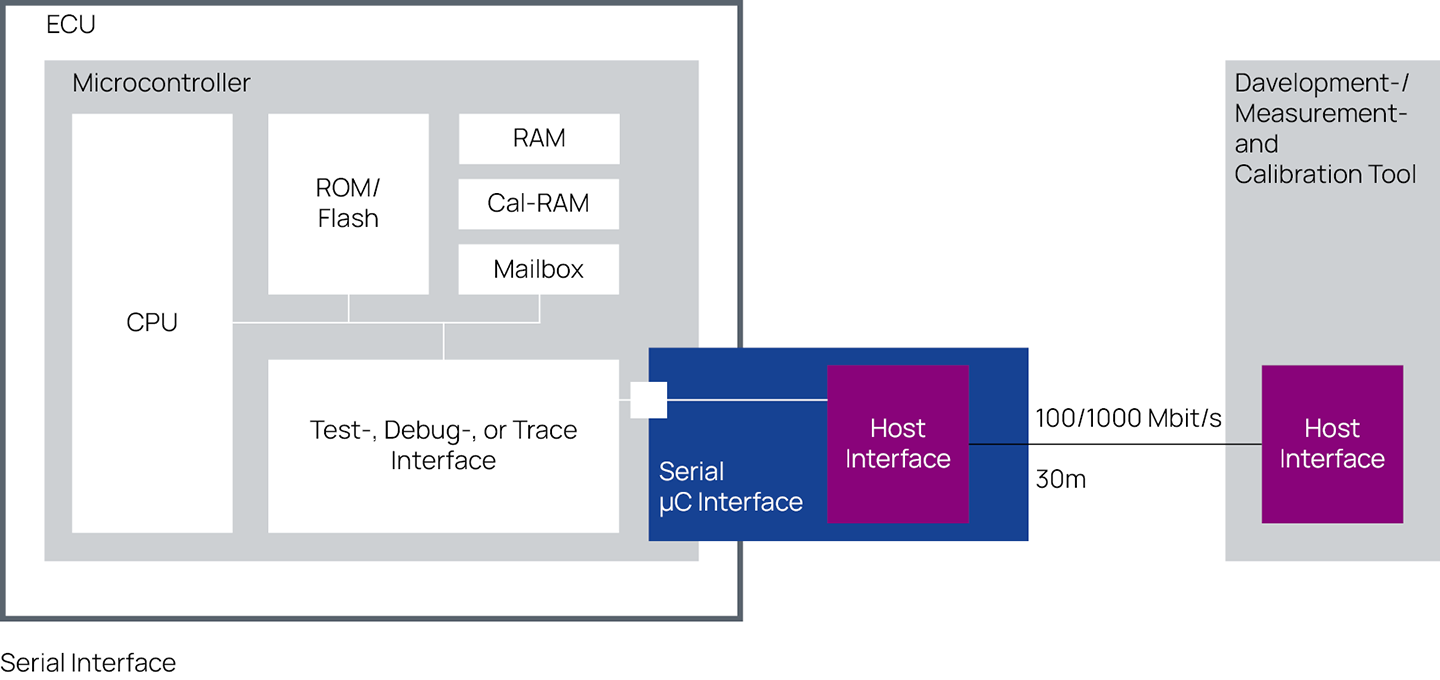
Wenn der Mikrocontroller des Steuergeräts keinen externen Daten- und Adressbus zur Verfügung stellt, kommt bei der Steuergeräteentwicklung häufig eine Mikrocontrollervariante mit erweitertem Speicher zum Einsatz. Die ETK-, FETK- oder XETK-Schnittstelle ermöglicht im Fahrzeug oder am Prüfstand den Zugriff auf den Mikrocontroller über eine leistungsfähige Test-, Debug- oder Trace-Schnittstelle, wie z. B. JTAG, NEXUS oder AURORA, über eine lange Distanz. Die seriellen und parallelen Steuergeräte-Schnittstellen sind aus Sicht der Anwendung identisch und steuergeräteunabhängig.