ETAS ASCMO-DYNAMIC使用户能够创建基于数据的模型,对复杂系统的动态/瞬态行为进行建模。ASCMO-DYNAMIC提供了大量用于可视化和分析系统行为的功能和选项。在开始进行优化时,可以导出到ASCMO-MOCA。它还可以用于创建基于DoE方法论(实验设计)的实验设计。
由于采用了机器学习领域的人工智能方法,用户不需要对后台算法有精确的了解就可以准确地对复杂的关系进行建模。因此,该软件的用户范围非常广,既有经验较少的用户——他们喜欢无参数、自动化的模型创建,也有专家——由于提供了广泛的配置选项,他们可以获得所需的所有自由。
ASCMO-DYNAMIC的一个典型应用是对内燃机的瞬态过程进行建模。特别是在真实驾驶排放(RDE)的情况下,单纯考虑排放和油耗往往是不够的。动态效应(如峰值)会对整体结果产生重大影响。当对油耗和污染物排放等相关变量进行建模时,不仅要考虑当前的设定值(如发动机转速、负载和发动机控制变量),还要考虑其历史值和变化率。这样,动态驾驶操作对相关输出变量的影响就可以予以详细的时间分辨分析。
ASCMO-DYNAMIC中使用的方法并不局限于内燃机,这意味着该工具也可用于电动汽车等领域(如电池建模)。
优点
- 方便使用,无需专业知识
- 来自机器学习领域的强大AI方法
- 数据和结果的交互式图形表示
- 能够使用标准格式共享模型和数据
- MATLAB®和COM接口,用于远程控制和整合客户专用功能
特点和功能
由于ASCMO-DYNAMIC中使用了基于数据的建模,因此通常必须通过在实际系统上进行测量获得这些数据。其中一个基本要素是实验设计(DoE),它能够以最少的测量工作量获得最大的模型精度。
通过DoE实验设计模块(ExpeDesDynamic),可以轻松计划基础测量。采用实验设计的方法,提出了一种调整变量的时间曲线,该曲线以空间填充的方式系统地接近具有不同梯度的不同最终值。
在每种情况下,最多可以在四个维度上以图形或数字方式限制要调整的参数的变化范围以及最大梯度。若使用公式编辑器,则可以在任意数量的维度上进行限制。此外,还可以特别添加静止点和真实驾驶周期的摘录,并设置实验空间某些区域中的点合并。有关在发动机测试平台上进行的动态测量的特殊方面和独特性,以高度实用的方式加以考虑。 各个维度上的曲线(轨迹)的图形表示有利于直接验证和评估DoE计划。
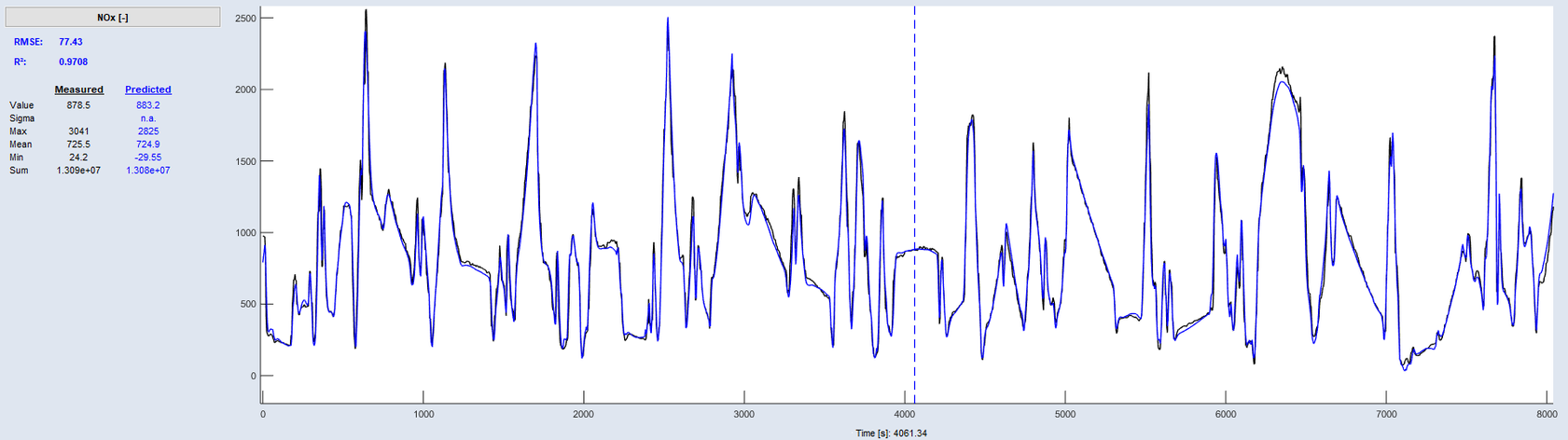
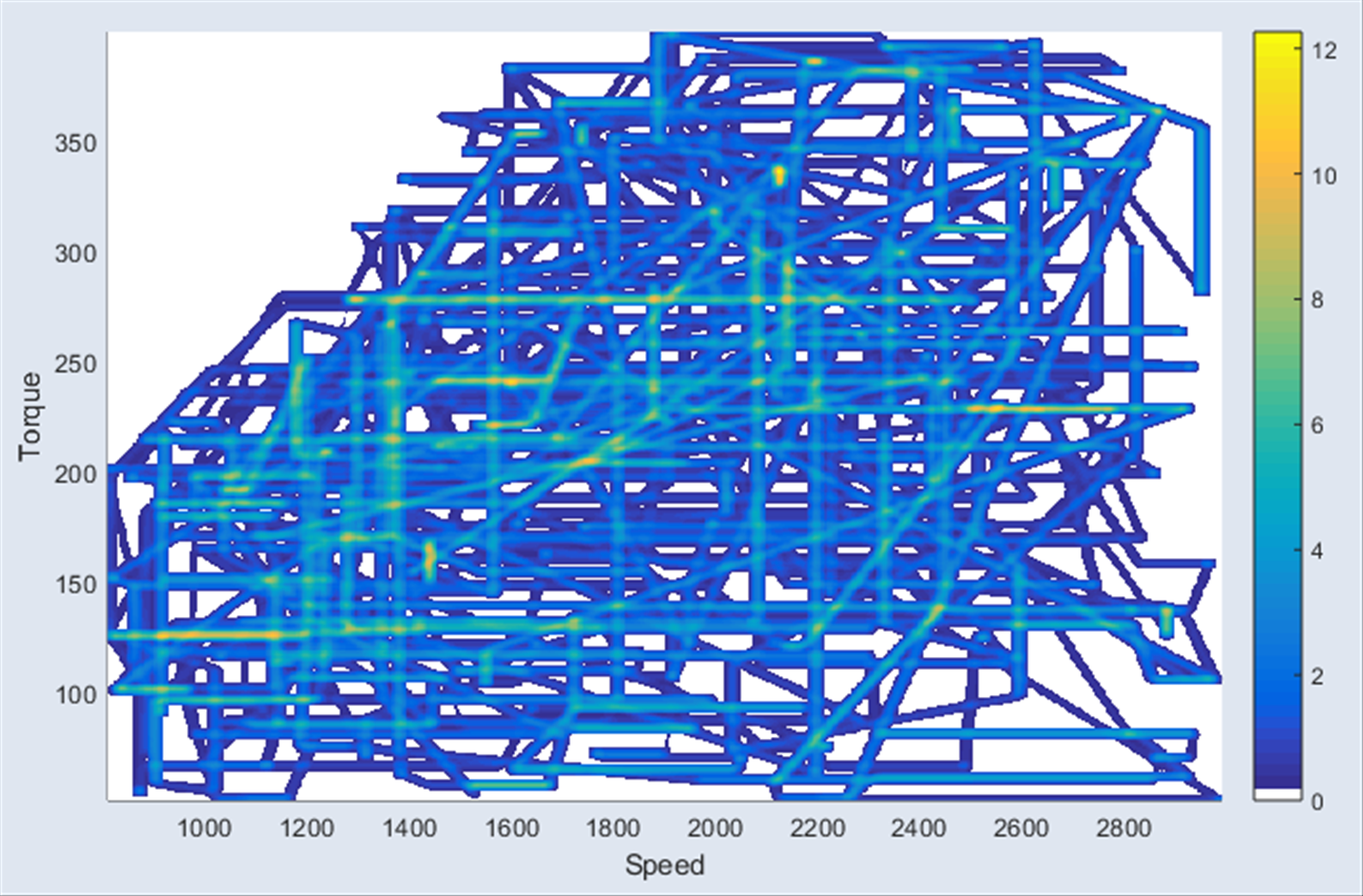
ASCMO-DYNAMIC使用基于时间的范围视图来显示基于模型的系统行为。上半部分显示输入变量,下半部分显示随时间变化的输出变量。除了ASCMO-DYNAMIC中的这个主视图外,还有其他各种选项可用于可视化依赖关系和影响。例如,这包括散点图,散点图可以以任意数量的不同组合将数据显示为点云。
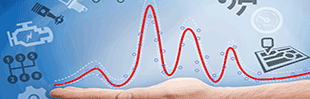
在模型质量和预测质量方面有广泛的分析选项。例如,会显示各种统计信息,比如平均值和极值以及均方根模型误差(RMSE)。此外,可以将模型预测与实际测量值进行比较,以便比较随时间变化的曲线。
成功建模的一个重要标准是测量过程中的适当采样率。由于通常会出现采样率过高的倾向,ASCMO-DYNAMIC提供了通过缩减采样来减少数据量的选项。这样既提高了模型的质量,同时也缩短了模型训练所需的时间。
ASCMO-DYNAMIC中建模的主要功能是能够准确、直接、可靠地预测动态/瞬态系统行为。该工具使经验较少的用户更容易使用所需的高级建模方法,但同时也使专家可以自由地调整模型参数,具有很高的灵活性。在ASCMO-DYNAMIC中,建模是基于高斯过程模型。这包括使用基于高斯过程的测量数据的统计学习方法,该方法已多次证明其价值。通过这种方法,可以自动确定最能代表实际系统行为的具体数学函数。
高斯过程模型的其他优点:
- 考虑了测量噪声,因此可以避免过拟合
- 对测量异常值的鲁棒性
- 局部解析的模型方差为用户提供了模型预测可靠性的度量
在对动态系统行为进行建模时,不仅要考虑当前的时间点,还要考虑过去的时间步长。多种建模方法可用于此用途。在使用高斯过程模型时,采用了一种将过去的时间步长作为附加输入馈入模型的结构。为此所需的过去时间步长由ASCMO-DYNAMIC自动确定。
对于特殊任务,除了高斯过程模型外,还提供了递归神经网络(RNN)种类中的其他模型类型。例如,RNN单元型LSTM(长-短期记忆)非常适合于那些影响可以追溯到很久以前的问题。
有经验的用户可以激活专家模式,这使他们能够访问所有模型选项和参数,从而在需要时进行特定的调整,这些调整会对模型训练产生影响。模型质量由易于理解的图表和关键数字表示。
所有模型也可以以不同的格式导出,并作为所谓的被控对象模型在ASCMO之外自由使用。可能格式的常见示例有Simulink、C代码和FMU/FMI。
有一种特殊的格式可用于创建在博世AMU(高级建模单元硬件加速器)上使用的导出。AMU是Bosch MDG1 ECU上的一个特殊模块,用于评估量产车中存储在其上的 ASCMO 模型。
在ASCMO-DYNAMIC中,这些模型可以用作虚拟测量仪器。这方面的一个例子是基于输入变量的时间序列来预测整个驾驶周期内的排放量。对于输入变量的所有所需参数组合,该模型将计算出相应的输出变量。就像实际测量一样(例如,在发动机测试平台上测量),可以使用这些人工测量数据,以图形方式对其进行分析,然后将其导出为CSV文件,以便在Excel中进行进一步处理。
兼容性
ASCMO-DYNAMIC具有开放性和灵活性。该工具支持所有相关的数据格式,例如,在测试平台上和标定中使用的数据格式。ASCMO-DYNAMIC可以将所创建的模型导出为各种格式,以便在其他环境中使用。使用MATLAB®接口,用户可以轻松地整合客户专用功能和模型,用脚本自动执行操作,或合并测试平台自动化。