ETAS ASCMO-DYNAMICを使用すると、複雑なシステムの動的/過渡的挙動をモデリングしたデータベースのモデルを作成できます。ASCMO-DYNAMICには、システムの挙動を可視化および解析するための豊富な機能やオプションが用意されています。ASCMO-MOCAにエクスポートすれば、最適化を行うことも可能です。 また、DoEの手法(Design of Experiments:実験計画法)に基づいた実験計画の作成に使用することもできます。
これには、AIを用いた機械学習分野の手法が使用されているため、アルゴリズムの詳細な背景知識が無くても複雑な関係性を正確にモデリングできます。そのため、このソフトウェアは、パラメータを使用せず自動化されたモデルで作成を行う経験の少ないユーザーから多様な設定オプションを使用して自由に作業を行う専門家まで、幅広いユーザーに利用されています。
ASCMO-DYNAMICの代表的な適用例は、内燃エンジンの過渡プロセスのモデリングです。特にReal Driving Emissions(RDE:実路走行排気)に関しては、エミッションや燃費を完全に定常な状態で考慮したモデルでも、多くの場合は不十分です。動的効果(ピークなど)は、結果全体に大きな影響を与え得るものです。燃費や汚染物質排出などの関連する変数をモデリングする際は、現在の設定値(エンジン回転数、負荷、エンジン制御変数など)だけでなく、それらの過去の値や変化率も考慮されます。これにより、動的な運転操作が関連出力変数に与える影響の時間分解解析を詳細に行えます。
ASCMO-DYNAMICで使用される手法は内燃エンジン以外にも適用できるため、このツールは電動化モビリティなどの分野(バッテリのモデリングなど)でも使用されています。利点
- 使いやすく、専門知識が不要
- AIを用いた機械学習分野の強力な手法
- データや結果をインタラクティブにグラフィック表示
- 標準化されている形式を使用してモデルやデータを共有することが可能
- MATLAB®およびCOMインターフェースによるリモート制御とお客様固有の機能の統合
特徴と機能
ASCMO-DYNAMICではデータベースのモデリングを使用するため、通常はこのデータを実際のシステムでの計測結果から取得する必要があります。この場合に実験計画法(DoE)が不可欠となります。DoEを使用することで、計測にかかる労力を最小限に抑えながら最大限のモデル精度を実現することができます。
DoE実験計画モジュール(ExpeDesDynamic)を使用すると、基本的な計測を容易に計画することができます。実験計画法を用いると、さまざまな勾配を持つさまざまな最終値に系統的に空間を埋めていくようにして近づける方法を用いて、調整変数の時間曲線の計画が立てられます。
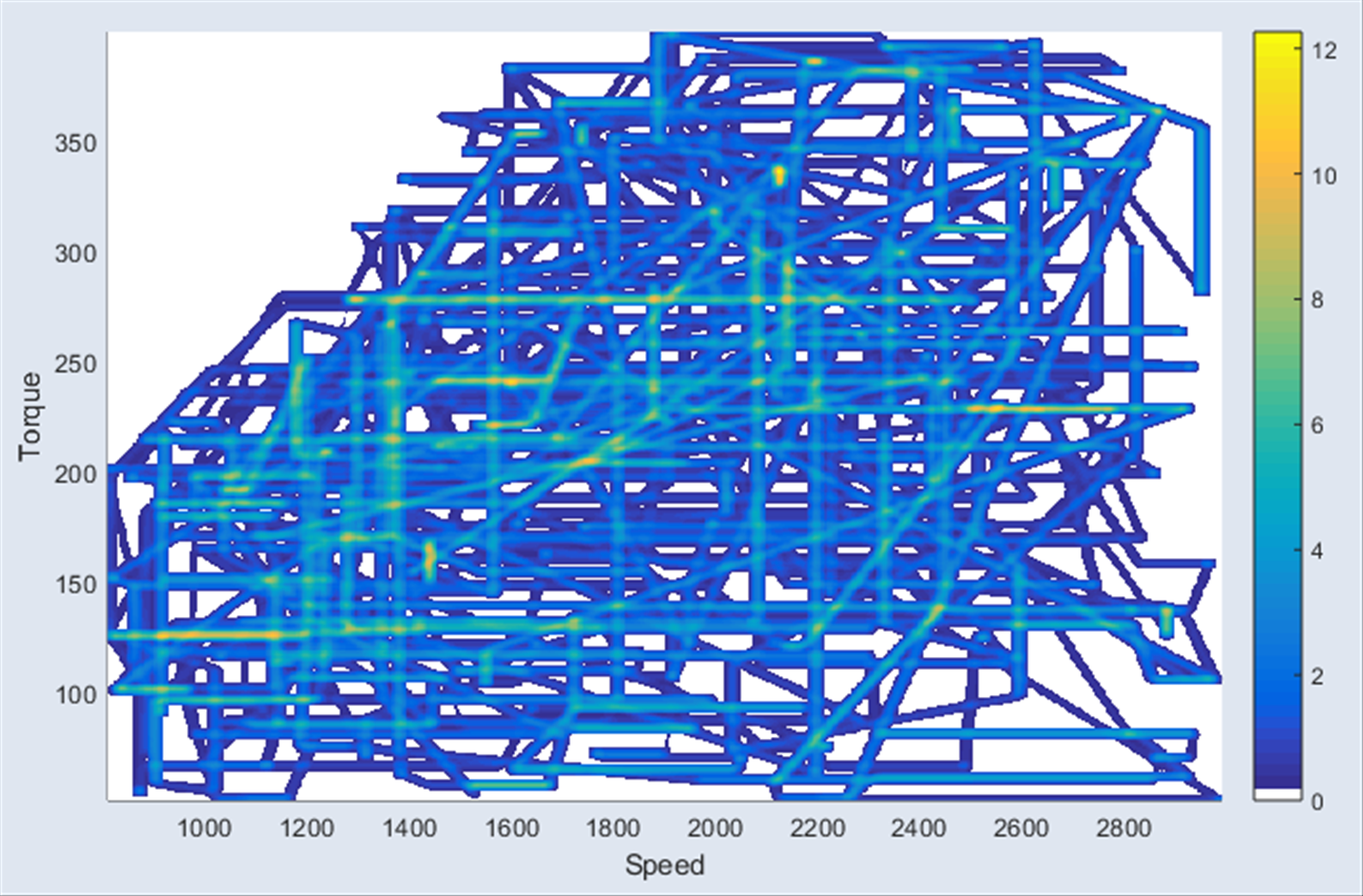
調整対象となるパラメータの変動範囲および最大勾配は、各ケース最大4つの次元でグラフィカルまたは数値的に限定することができます。これはフォーミュラエディタを使用して任意の数の次元で実施できます。さらに、実際の運転サイクルの定常ポイントや抽出データを個別に追加したり、実験空間の特定領域にあるポイントを統合したりすることができます。エンジンテストベンチで実施された動的計測に関する特殊な側面や特性は、極めて実用的な方法で考慮されます。曲線(軌道)はすべての次元でグラフィカルに表示されるため、DoE計画を容易に妥当性確認し評価することができます。
ASCMO-DYNAMICでは、モデルに基づいたシステム挙動の表示に時間ベースのスコープビューを使用します。上部には入力変数が表示され、下部には出力変数が経時的に示されます。ASCMO-DYNAMICでは、このメインビュー以外に、依存関係や影響をビジュアルに表示できる他のさまざまなオプションも使用可能です。これには、データを多数のさまざまな組み合わせ方で点群として表示できる散布図などが含まれます。
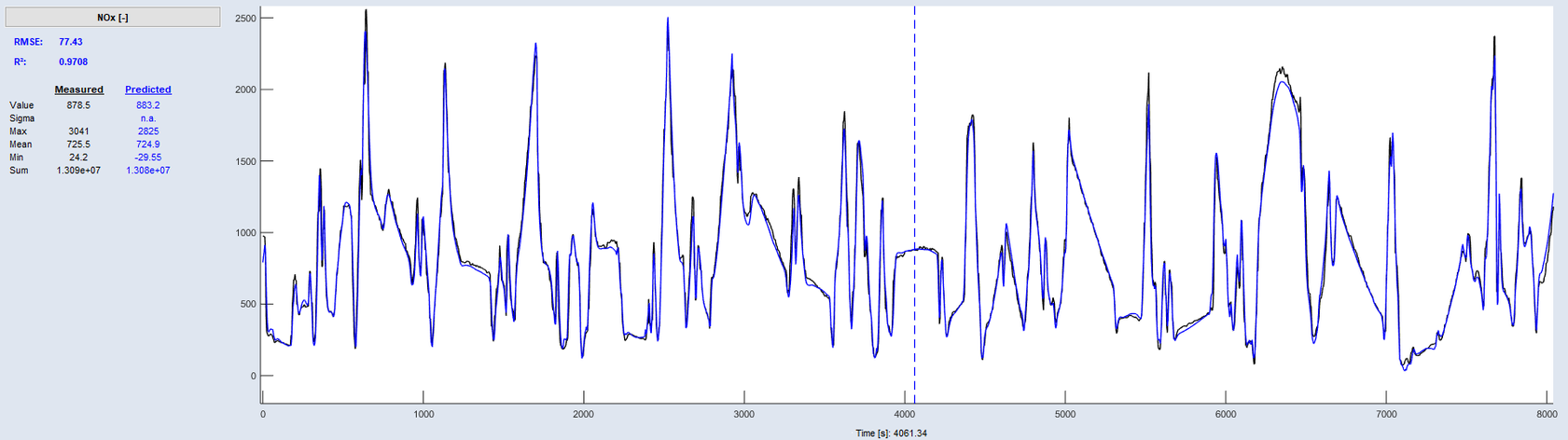
モデル品質や予測品質については、広範な解析オプションが使用可能です。たとえば、平均値や極値、モデルの根平均二乗誤差(RMSE)などの幅広い統計情報が表示されます。さらに、モデルの予測を実際の計測値と比較して経時的に曲線を比較することができます。
モデリングを成功させるための重要な基準は、計測中のサンプリングレートを適切にすることです。通常、サンプリングレートは高くなりすぎる傾向があるため、ASCMO-DYNAMICにはダウンサンプリングによってデータ量を削減するオプションが組み込まれています。これにより、モデルの品質が向上すると共に、モデルのトレーニングに要する時間が短縮されます。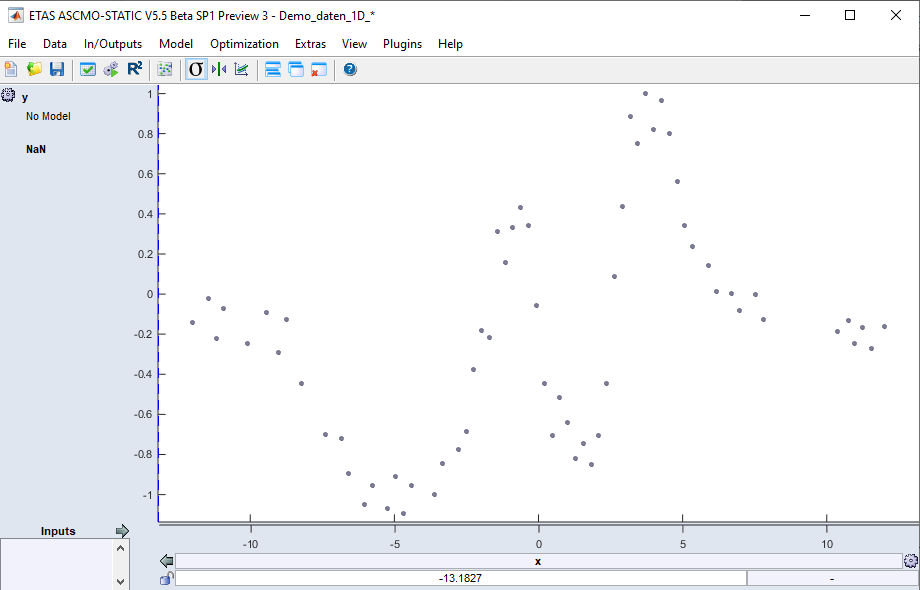
ASCMO-DYNAMICでモデリングを行う主な目的は、システムの動的/過渡的挙動を高い精度で簡単かつロバストに予測できるようにすることです。このツールを使用すると、経験の少ないユーザーでもそのために必要な高度なモデリング手法を容易に使用でき、専門家であればASCMOの高度な柔軟性を活用してモデルのパラメータを自由に調整できます。ASCMO-DYNAMICでは、ガウス過程を使用してモデリングを行います。これは、ガウス過程ベースの計測データを使用して統計的に学習を行う手法であり、その価値はこれまで何度も実証されています。これにより、実際のシステム挙動を最も良く表す個別の数学的関数を自動的に同定することができます。
ガウス過程モデルのその他の利点は次のとおりです。
- 計測ノイズが考慮されるため、オーバーフィッティングを回避することが可能
- 外れ値に対するロバスト性を提供
- モデルの差異が局所的に解消されるため、モデル予測の信頼性を評価することが可能
システムの動的挙動をモデリングする場合は、現時点だけでなく過去の時間ステップも考慮することが必要です。これには、さまざまなモデリング手法を使用できます。ガウス過程モデルでは、過去の時間ステップを追加入力としてモデルに供給します。そのために必要な過去の時間ステップは、ASCMO-DYNAMICにより自動的に決定されます。
特殊なタスクの場合は、ガウス過程モデルと共に、再帰型ニューラルネットワーク(RNN)のクラスから追加のモデルタイプが提供されます。たとえば、RNNセルタイプのLSTM(Long Short-Term Memory:長短期記憶)は、はるか過去にさかのぼって影響する問題に最適です。
経験豊富なユーザーはエキスパートモードをアクティブ化すれば、すべてのモデルオプションやパラメータにアクセスできるため、必要に応じてモデルのトレーニングに影響を与える調整を個別に行うことができます。また、分かりやすいグラフや評価指標の表示を使用してモデル品質の評価を行うこともできます。
また、すべてのモデルは多様な形式でエクスポートし、いわゆるプラントモデルとして外部のASCMOで自由に使用することも可能です。使用可能な形式の代表例は、Simulink、C‑コード、およびFMU/FMIです。
Bosch AMU(Advanced Modeling Unitハードウェアアクセラレータ)で使用するファイルをエクスポートする場合は、専用の形式を使用します。AMUはBosch MDG1 ECUの専用モジュールであり、量産車両のECUに保存されたASCMOモデルを評価する場合に使用します。ASCMO-DYNAMICでは、モデルを仮想計器として使用することができます。入力変数の時系列に基づいて運転サイクル全体でエミッションを予測することもその一例です。入力変数の必要なすべてのパラメータの組み合わせについては、対応する出力変数がモデルから計算されます。この人工的な計測データは、(エンジンテストベンチなどで)実際に計測されたデータと同様に使用でき、グラフィカルに解析することや、CSVファイル形式でエクスポートしてExcelでさらに処理することができます。
互換性
ASCMO-DYNAMICは、オープン性と柔軟性に優れており、テストベンチや適合業務などで使用される主なデータ形式をサポートしています。また、作成したモデルをさまざまな形式でエクスポートして他の環境で使用することができます。MATLAB®インターフェースを使用すれば、お客様固有の機能やモデルの統合、スクリプトによる操作の自動化、または自動化されたテストベンチの導入を容易に行うことができます。