ETAS ASCMO-DYNAMIC ermöglicht die Erstellung von datenbasierten Modellen, die das dynamische/transiente Verhalten komplexer Systeme abbilden. Dabei bietet ASCMO-DYNAMIC umfangreiche Möglichkeiten zur Visualisierung und Analyse des Systemverhaltens. Um eine Optimierung durchführen zu können ist der Export der Modelle nach ASCMO-MOCA möglich. Zusätzlich können Versuchspläne nach der DoE-Methodik (Design of Experiments) erzeugt werden.
Es werden dabei KI-Methoden aus dem Bereich des maschinellen Lernens eingesetzt, die es dem Anwender erlauben, komplexe Zusammenhänge präzise zu modellieren, ohne dabei genaue Kenntnisse der Algorithmen im Hintergrund zu benötigen. Aus diesem Grund wird die Software von einem breiten Anwenderkreis genutzt. Dazu zählen weniger erfahrene Anwender, die eine parameterfreie, automatisierte Modellerstellung schätzen, aber auch Experten, denen durch umfangreiche Einstellmöglichkeiten alle Freiheiten geboten werden.
Eine typische Anwendung von ASCMO-DYNAMIC ist die Modellierung von transienten Vorgängen in Verbrennungsmotoren. Insbesondere im Kontext der Real Driving Emissions (RDE) ist eine rein stationäre Betrachtung der Emissionen und des Kraftstoffverbrauchs oft nicht ausreichend. Dynamische Effekte (z. B. Peaks) können das Gesamtergebnis signifikant beeinflussen. Bei der Modellierung relevanter Größen wie Kraftstoffverbrauch und Schadstoffemissionen werden nun nicht nur die aktuellen Einstellwerte (beispielsweise Drehzahl, Last sowie motorische Stellgrößen), sondern auch deren Vorgeschichte und die Änderungsrate berücksichtigt. Somit ist eine detaillierte, zeitaufgelöste Analyse des Einflusses von dynamischen Fahrmanövern auf die relevanten Ausgangsgrößen möglich.
Die in ASCMO-DYNAMIC eingesetzte Methodik ist unabhängig vom Verbrennungsmotor, sodass das Tool auch in Bereichen wie der E-Mobilität (z. B. Batteriemodellierung) eingesetzt wird.
Vorteile
- Einfache Bedienung ohne Spezialkenntnisse
- Leistungsfähige KI-Methoden aus dem Bereich des maschinellen Lernens
- Interaktive grafische Darstellung von Daten und Ergebnissen
- Austausch von Modellen und Daten auf Basis von Standardformaten
- MATLAB®- und COM-Schnittstellen zur Fernsteuerung und Integration von kundenspezifischen Funktionen
Funktionsbereiche
Da bei ASCMO-DYNAMIC datenbasierte Modellierung zum Einsatz kommt, müssen diese Daten typischerweise durch Messungen an einem realen System gewonnen werden. Ein wesentliches Element dazu bildet die statistische Versuchsplanung (Design of Experiments, DoE), mit der eine maximale Modellgenauigkeit bei minimalem Messaufwand erreicht werden kann.
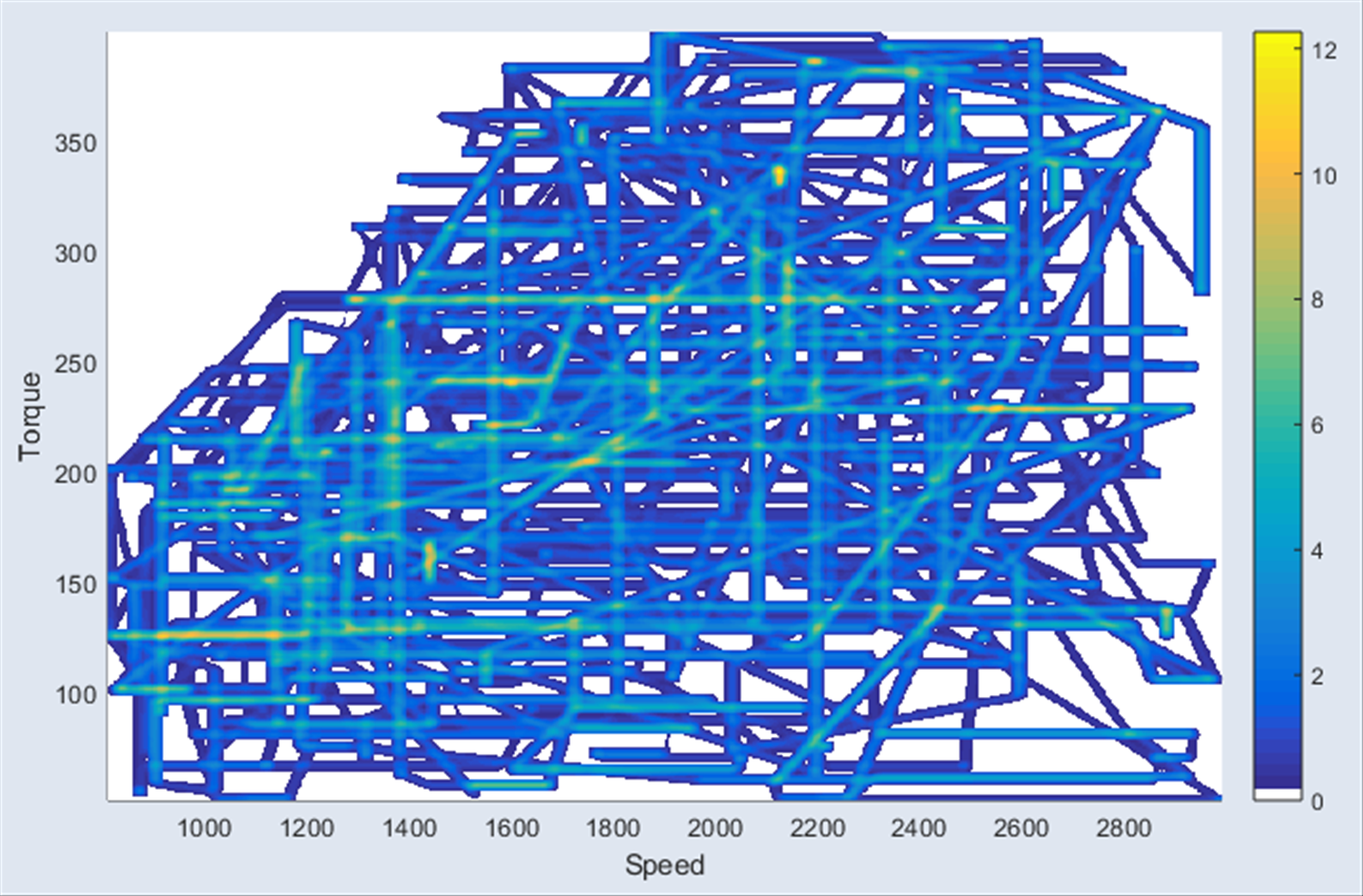
Mit dem DoE-Versuchsplanungsmodul (DYNAMIC ExpeDes) lassen sich die zugrunde liegenden Messungen auf einfache Weise planen. Mithilfe von Methoden der statistischen Versuchsplanung wird ein zeitlicher Verlauf der Verstellgrößen vorgeschlagen, bei dem systematisch und raumfüllend (Space-Filling) unterschiedliche Endwerte mit unterschiedlichen Gradienten angefahren werden.
Sowohl der Variationsbereich als auch die maximalen Gradienten der zu verstellenden Parameter können dabei grafisch oder numerisch in jeweils bis zu vier Dimensionen eingeschränkt werden. Mit einem Formeleditor ist das in beliebig vielen Dimensionen möglich. Des Weiteren können gezielt Stationärpunkte sowie Ausschnitte aus realen Fahrzyklen hinzugefügt sowie eine Verdichtung der Punkte in bestimmten Regionen des Versuchsraums eingestellt werden. Besonderheiten der dynamischen Vermessung an einem Motorprüfstand werden praxisgerecht berücksichtigt. Grafische Darstellungen der Verläufe (Trajektorien) in allen Dimensionen erlauben die einfache Überprüfung und Beurteilung des DoE-Plans.
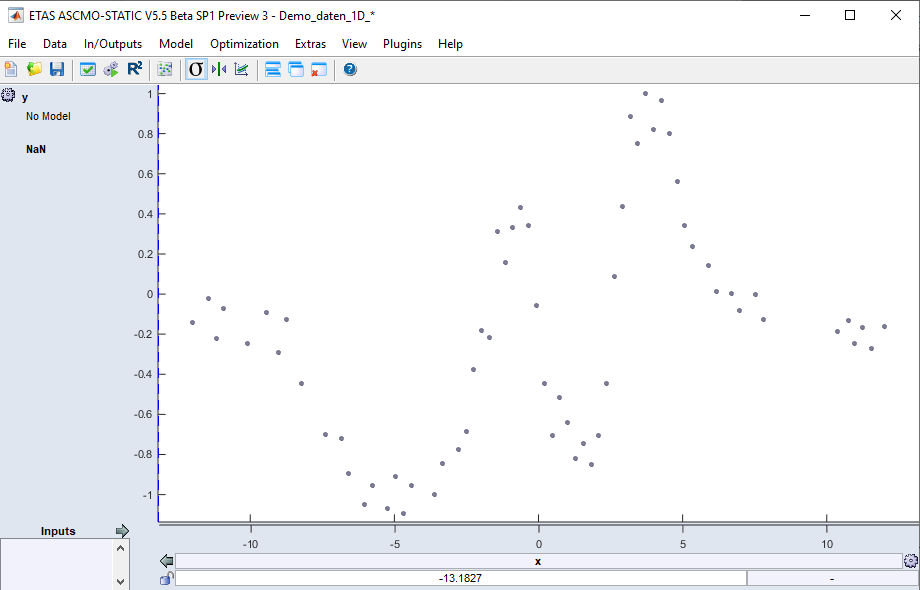
Die Darstellung des Systemverhaltens auf Basis des Modells erfolgt in ASCMO-DYNAMIC in Form von zeitbasierten Scope-Views. Im oberen Teil sind dabei die Eingangsgrößen, im unteren die Ausgangsgrößen über der Zeit dargestellt. Neben dieser Hauptansicht in ASCMO-DYNAMIC gibt es eine Reihe weiterer Möglichkeiten, die Abhängigkeiten und Einflüsse zu visualisieren. Dazu gehört beispielsweise auch die Darstellung im Scatter-Plot, der die Daten als Punktwolke in beliebigen Kombinationen darstellen kann.
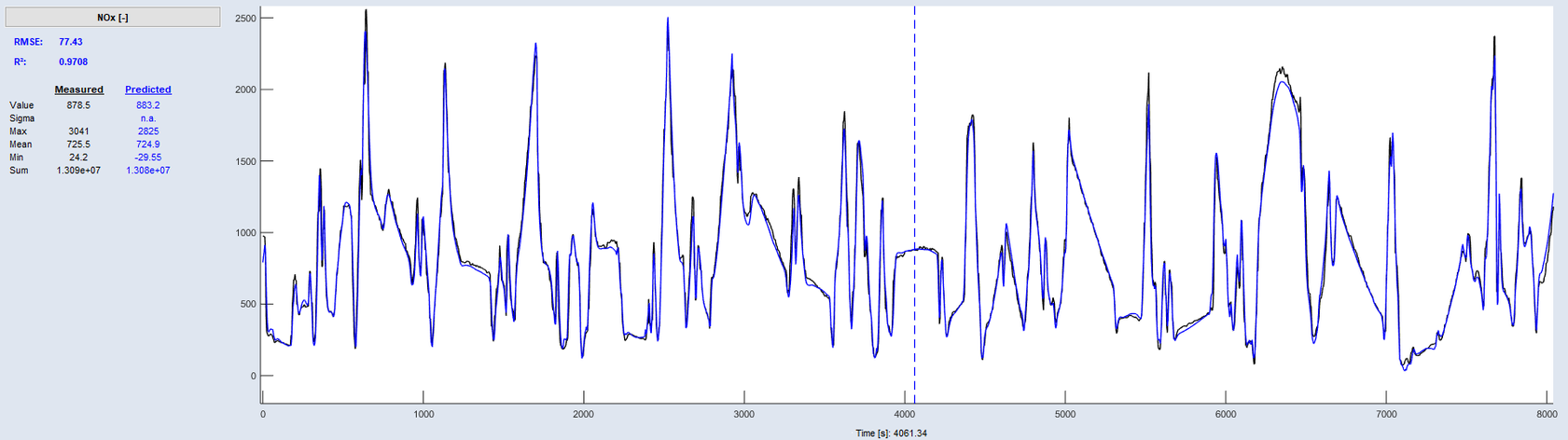
Zur Modell- und Vorhersagegüte stehen umfangreiche Analysemöglichkeiten zur Verfügung. Beispielsweise werden eine Reihe statistischer Informationen wie die Mittel- und Extremwerte sowie der mittlere quadratische Modellfehler (RMSE) angezeigt. Zudem kann die Modellvorhersage einer realen Messung gegenübergestellt werden, um die Verläufe zeitaufgelöst zu vergleichen.
Ein wichtiges Kriterium für eine erfolgreiche Modellierung ist eine geeignete Abtastrate bei der Messung. Nachdem typischerweise tendenziell zu hoch abgetastet wird, gibt es in ASCMO-DYNAMIC die Möglichkeit, den Datenumfang durch „Downsampling“ zu reduzieren. Dies erhöht die Modellgüte und verkürzt zugleich das Modelltraining.
Hauptaufgabe der Modellbildung in ASCMO-DYNAMIC ist es, eine präzise Vorhersage des dynamischen/transienten Systemverhaltens einfach und robust zu ermöglichen. Der Einsatz der dafür benötigten modernen Modellierverfahren soll weniger erfahrenen Anwendern zugänglich gemacht werden, Experten jedoch gleichzeitig die Möglichkeit geben, flexibel Anpassungen an Modellparametern vorzunehmen. In ASCMO-DYNAMIC werden dafür Gauß-Prozessmodelle zugrunde gelegt. Dabei handelt es sich um ein statistisches Lernverfahren anhand von Messdaten auf Basis von Gauß-Prozessen, das sich schon oft bewährt hat. So wird automatisch die spezifische mathematische Funktion bestimmt, die das reale Systemverhalten am besten abbildet.
Vorteile der Gauss-Prozess Modelle:
- Messrauschen wird implizit berücksichtigt, so dass eine Überanpassung (Overfitting) vermieden werden kann
- Robustheit gegenüber Messausreißern
- Örtlich aufgelöste Modellvarianz gibt dem Anwender ein Maß für die Verlässlichkeit der Modellvorhersage
Für die Modellierung von dynamischem Systemverhalten ist es notwendig, nicht nur den aktuellen Zeitpunkt, sondern auch die vergangenen Zeitschritte mit zu berücksichtigen. Dafür gibt es unterschiedliche Modellierungsverfahren. Zur Verwendung der Gauß-Prozessmodelle wird eine Struktur verwendet, bei der Zeitschritte aus der Vergangenheit als weitere Eingänge in das Modell geführt werden. Die nötigen vergangenen Zeitschritte werden von ASCMO-DYNAMIC automatisch bestimmt.
Für spezielle Aufgaben werden neben den Gauß-Prozessmodellen weitere Modelltypen aus der Klasse der „Rekurrenten Neuronalen Netzwerke“ (RNN) angeboten. Der RNN-Zell-Typ LSTM (Long Short-Term Memory) eignet sich beispielsweise gut für Problemstellungen mit weit in die Vergangenheit reichenden Einflüssen.
Erfahrene Anwender haben nach der Aktivierung des „Expertenmodus“ auf sämtliche Optionen und Parameter des Modells Zugriff und können das Modelltraining so bei Bedarf gezielt beeinflussen. Die Modellgüte wird jeweils durch leicht verständliche Grafiken und Kennzahlen angezeigt.
Sämtliche Modelle lassen sich auch in unterschiedlichen Formaten exportieren und außerhalb von ASCMO frei als sogenanntes Streckenmodell nutzen. Gängige Beispiele für mögliche Formate sind Simulink, C-Code oder auch FMU/FMI.
Als besonderes Format steht der Export für den Betrieb auf der Bosch-AMU (Hardwarebeschleuniger Advanced Modeling Unit) zur Verfügung. Die AMU ist ein spezieller Baustein auf dem Bosch Motorsteuergerät MDG1 und dient der Auswertung des dort gespeicherten ASCMO-Modells in Serienfahrzeugen.
In ASCMO-DYNAMIC können die Modelle als sogenanntes virtuelles Messgerät verwendet werden. Ein Beispiel dafür ist die Vorhersage von Emissionen über einen kompletten Fahrzyklus, welche auf Zeitreihen für die Eingangsgrößen basiert. Das Modell berechnet dann für alle gewünschten Parameterkombinationen der Eingangsgrößen die zugehörigen Ausgangsgrößen. Diese künstlichen Messdaten können genau wie reale Messungen, zum Beispiel vom Motorprüfstand, genutzt, grafisch analysiert und für die weitere Bearbeitung in Excel als CSV-Datei exportiert werden.
Kompatibilität
ASCMO-DYNAMIC ist offen und flexibel. Das Werkzeug unterstützt alle relevanten Datenformate, welche zum Beispiel am Prüfstand und in der Applikation verwendet werden. ASCMO-DYNAMIC kann erstellte Modelle in verschiedenen Formaten exportieren, um sie in anderen Umgebungen zu nutzen. Mithilfe der MATLAB®-Schnittstelle lassen sich kundenspezifische Funktionen und Modelle einfach integrieren, Abläufe per Scripting automatisieren oder eine Prüfstandsautomatisierung anbinden.