03/18/2016
Development of distributed control strategies: Accessing multiple ECUs with ETAS INCA
Do you know this challenge?
A control strategy can involve multiple ECUs. Synchronized measurement data must be acquired across multiple ECUs and buses to develop calibration data for an overlaying control strategy.
Our solution: INCA‘s multiple ECU access capabilities
Apart from accessing an ECU for measurement and calibration via ETK/XETK, INCA is able to synchronously acquire ECU and sensor data via bus interfaces. Furthermore, INCA can also simultaneously access multiple ECUs via high speed ECU interfaces like ETK/XETK or XCP-on-Ethernet.

Technical details
In this sample set up, INCA is connected to the ECUs via an ETK interface, and CAN and FlexRay buses using an ES595 Interface Module. Additionally, INCA accesses two other ECUs via XCP-on-Ethernet using the ES600 Network Module.
All ECUs are available for measurement and calibration in INCA. In addition, INCA can monitor the CAN and the FlexRay bus. All measurements can be viewed within the same experiment environment and be logged synchronously in a single measurement file.
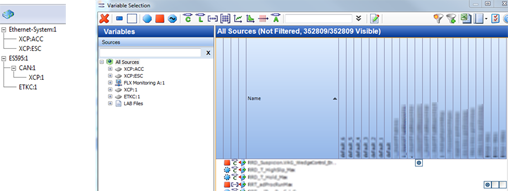
Working on control strategies involving multiple ECUs typically means dealing with tens or even hundreds of thousands of labels. In order to select and configure labels in an efficient and fast manner, INCA provides various filter mechanisms in its variable selection dialog.
LAB files allow the grouping of labels needed for a work task, even if they belong to different functions or ECUs. Filtering the labels in this way greatly simplifies the assembly of multi-source INCA experiments and helps to focus on the engineer’s task.
Tools used
ETAS INCA V7.1
Hardware: ES600, ES595
Download
Technical Note - Working with multiple ECUs in INCA: Details on how to use INCA in a multi ECU environment.
Your ETAS Contact
ETAS GmbH
Markus Gebhardt
Borsigstrasse 14
70469 Stuttgart, Germany
Phone: +49 711 3423-2278
E-Mail: markus.gebhardt@etas.com