A new direction: AUTOSAR Adaptive
A new standard for connected automotive software
Automotive software is undergoing fundamental changes. New functions and E/E architectures require new software architectures and infrastructures for embedded software. Powerful vehicle computers (VCs) with microprocessors, based on POSIX operating systems, and the AUTOSAR Adaptive standard are supplementing and in some cases even replacing conventional ECUs with microcontrollers. What changes will this bring about in software development and why is becoming familiar with AUTOSAR Adaptive overdue?
When the first AUTOSAR standard was introduced, it was hardly love at first sight. It took nearly a decade before OEMs and suppliers really aligned their development projects with the standard. So it may come as a surprise that ETAS, together with Robert Bosch GmbH, already offers tools, a platform software framework, and services for the integration of the future AUTOSAR Adaptive standard, even though the standardization is still far from complete. Why the hurry? Well, first let’s take a look at the standard itself.
What is AUTOSAR Adaptive?
While ECU development has in the past focused on stringent real-time and safety requirements, today aspects such as updatability and upgradability are taking center stage. This includes the dynamic reloading of software components and the use of standard libraries, e.g., for image processing, independent learning of functions, and security updates.
ECUs based on the AUTOSAR Adaptive Platform standard make it possible to easily upgrade applications throughout the entire vehicle lifecycle and to subsequently add new software functions, for instance via over-the-air software updates. It is also possible to develop, test, and update functions independently of each other in distributed working groups and then integrate the functions into the overall system at any time.
This is achieved through “service-oriented communication” within the software applications. Unlike with the AUTOSAR Classic Platform, these Adaptive Applications are integrated into the Adaptive Platform at runtime using metadata in the form of “Manifests” that describe the actual functionality and how the platform can work with it.
The operating system for the Adaptive Platform is POSIXcompliant according to PSE51, defined in IEEE1003.13. POSIX (Portable Operating System Interface) is a standardized programming interface between the application function and the operating system. It makes vehicle software development significantly more flexible. In the vehicle, applications are arbitrarily distributed to the ECUs via the Adaptive Platform. The AUTOSAR OS interface, which is part of the AUTOSAR Runtime for Adaptive Applications (ARA), links the operating system with the application.
The current AUTOSAR Adaptive Platform standard is rated for applications up to ISO 26262 ASIL B. Microcontrollers (µCs) with the AUTOSAR Classic Platform are recommended for more stringent safety requirements. Since AUTOSAR Classic and Adaptive were designed on a common basis, the two standards can be combined to increase the safety class of the overall system. The link between the two AUTOSAR standards can be created directly using the AUTOSAR Classic Platform services. As an alternative, the various signals of classic AUTOSAR ECUs can be automatically mapped to services on adaptive ECUs.

Get started today!
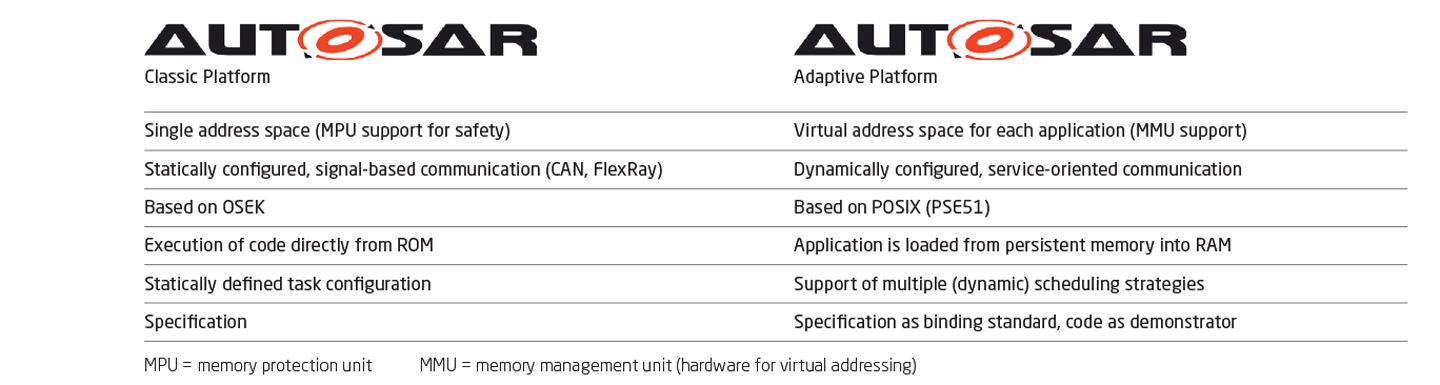
AUTOSAR Adaptive uses existing software technologies that have been tried-and-tested in other sectors and tailors them for use in vehicles (Fig. 1). To realize software for future connected and automated vehicle systems, developers must explore new avenues and become familiar with the new standard, which differs in key points (Fig. 2). An upheaval like this poses enormous challenges for established players. Not only do methods and tools have to change, but also processes and organizational structures. Companies need to get started today, since this path will not be easy and there is a lot of market pressure, answering the question above as to why the hurry.
This is why ETAS and Bosch developed a basic software framework known as RTA-VRTE (Vehicle Runtime Environment) based on AUTOSAR Adaptive that integrates POSIX operating systems such as Blackberry QNX and Linux. Customers can already use this framework to gain practical experience and thus prepare for the future in good time. Read the next article to find out what ETAS can offer in this regard.
Authors
Dr. Núria Mata is Consultant for Engineering RTA Solutions at ETAS GmbH.
Dr. Stuart Mitchell is AUTOSAR Expert at ETAS Ltd. in York, UK.
