The INCA-LIN add-on enables the use of all LIN functionalities and interfaces implemented in INCA which support the development and calibration of ECUs that are connected to sensors or actuators via LIN.
LIN signals are handled in their physical representation and are time synchronized with all other measurement and calibration data in INCA. The causal order of time synchronous data eases the measurement data analysis.
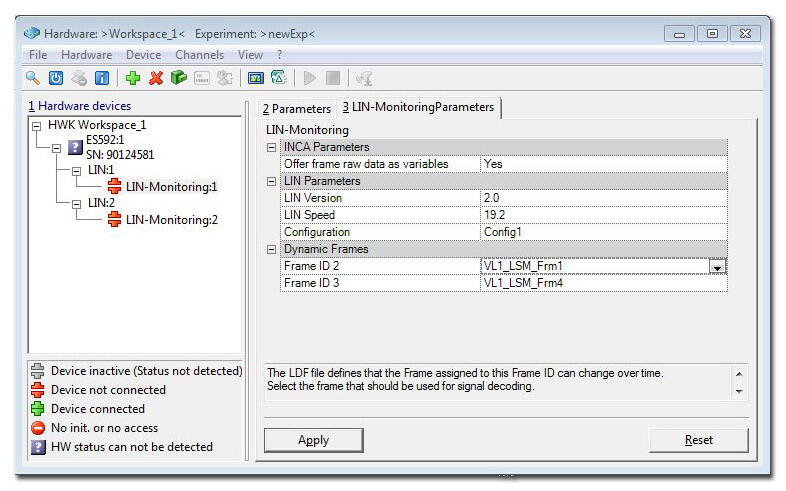
INCA-LIN supports optional LIN features like dynamic frames and configurations. Basis for the easy configuration of the interface hardware and the selection of signals to be measured is the LIN Description File (LDF).
Functions at a Glance
- Support of LIN versions V1.3, V2.0, and V2.1
- Monitoring of physical signals contained in LIN frames
- Monitoring of raw data from the payload segment of LIN frames
- Interface configuration and signal decoding by use of LIN Description Files (LDF)
- Support of dynamic frames (frame interpretation changes online)
- Possibility to pre-define dynamic frames
- Time synchronization between LIN and other (ETK, CAN, FlexRay, sensor) data
- Easy signal selection by pre-ordered groups (ECU, Frame)
- Passive bus behavior of the LIN interface (no bus interference)
- Write back imported LDF files from the INCA database to the file system
- Support of the following interface hardware:
- ES592 Interface Module: CAN, LIN, ETK, and XETK/Ethernet
- ES595 Interface Module: CAN, LIN, FlexRay, ETK, and XETK/Ethernet
- ES891/ES892 Interface Module: CAN / CAN FD, LIN, FlexRay, FETK, and XETK/Ethernet
- ES910 Prototyping and Interface Module: CAN, LIN and ETK, FleyRay by ES920 extension
- CANcaseXL: CAN and LIN
- CANcardXLe: CAN and LIN