Replacing human senses with measurement data
Scalable measurement data acquisition for ADAS development

To enable automated driving, sensor systems must replace human sensory perception. To design these systems and check their function at all stages of development, system developers need comprehensive access to measurement data. New modular measurement technology from ETAS is helping to acquire and deliver this data.
Eyes, ears, experience, and a healthy dose of intuition – that is all you currently need to drive a car. But, because people get tired and distracted and are sometimes slow to react, there is a growing move toward the use of advanced driver assistance systems (ADAS). The hope is that these systems will make automated driving possible within a few years. Instead of using our eyes and ears, the vehicle’s surroundings will then be monitored by radar, lidar, video, and ultrasonic sensors.
Powerful electronic control units (ECUs) are used to coordinate the complex sensor networks. These must be capable of processing huge quantities of data and deriving driving strategies from this data within a matter of milliseconds. To develop these complicated control strategies efficiently, development of the software functions is shifting to the lab. Wherever possible, virtualization is replacing experiments based on real hardware. Yet this approach relies on adequate validation of the models with real environment data. This requires reliable, flexible tools for efficient data acquisition as well as the possibility of accessing data via a cloud or back end (Fig. 1).
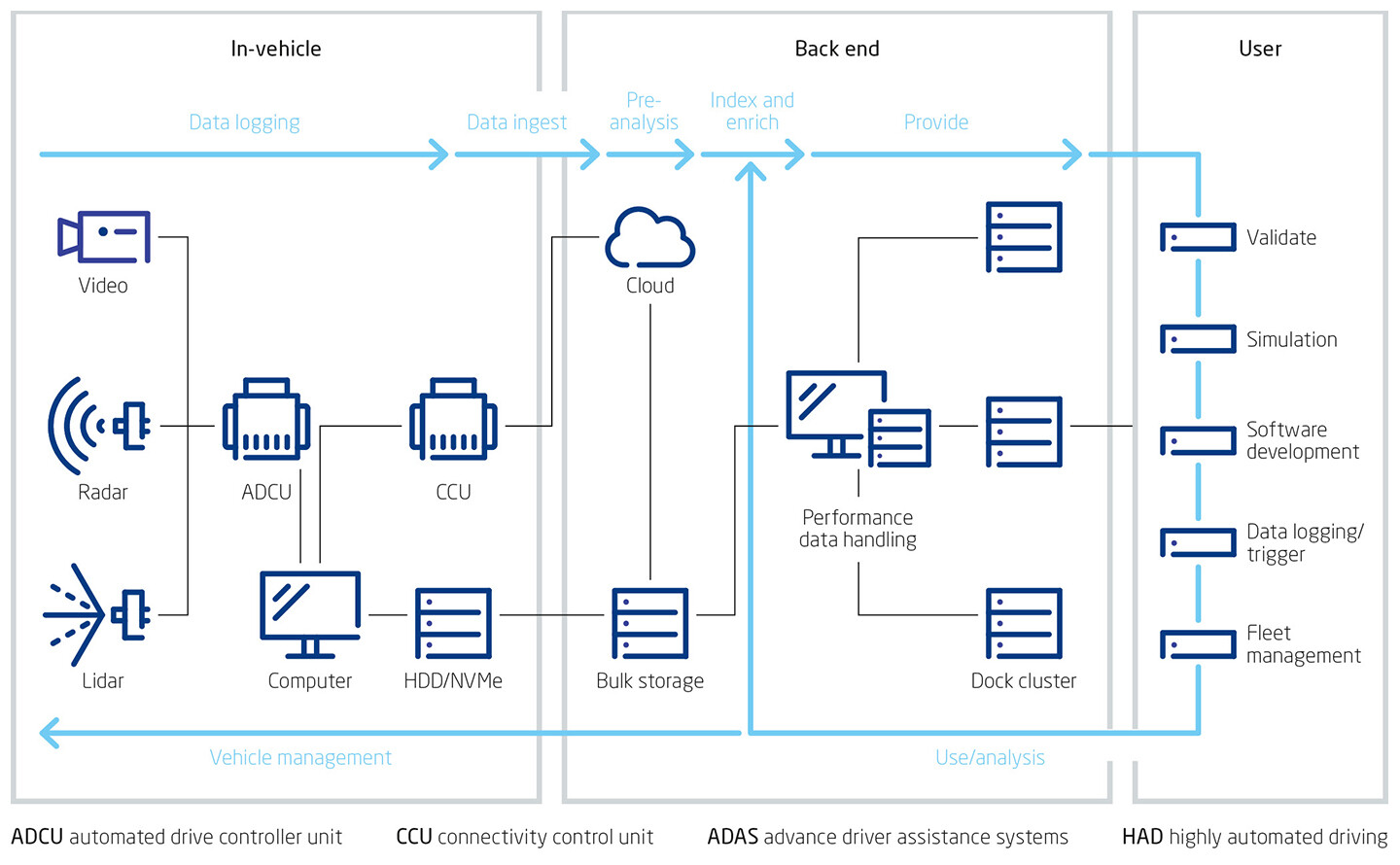
Moreover, such a development environment must be capable of being integrated into the vehicle development processes that are split between OEMs and suppliers and supporting their various maturity levels – from prototyping and the various phases of development and function extensions right through to fleet management after start of production. Whatever the phase, developers need solutions for acquiring measurement data and accessing this data. It is important to note that configurations vary, so adequate data volumes may range from just a few megabytes (MB) to several gigabytes (GB) per second. ETAS offers a modular portfolio of scalable solutions specifically designed to meet these requirements. These solutions provide optimum support for in-vehicle data acquisition (DAQ) in every phase.
In-vehicle data acquisition from the prototyping phase
This in-vehicle DAQ is extremely important because it supplies the database that can be used to validate the virtualized development of automated driving functions. Yet, particularly in the prototyping phase, such data acquisition has previously been unsuccessful due to the fact that, as a rule, production-ready ECU and sensor hardware is not yet available. To allow earlier development work to proceed, simulated ECUs implemented on industrial PCs are typically utilized. These simulated ECUs provide different interfaces and properties than hardware intended for production, preventing the usage of legacy ETAS hardware-oriented measurement technology such as the emulator test probe (ETK). To fill this gap and enable data measurements to begin from the prototyping phase, ETAS has developed a virtual GETK, the V-GETK (Fig. 2).
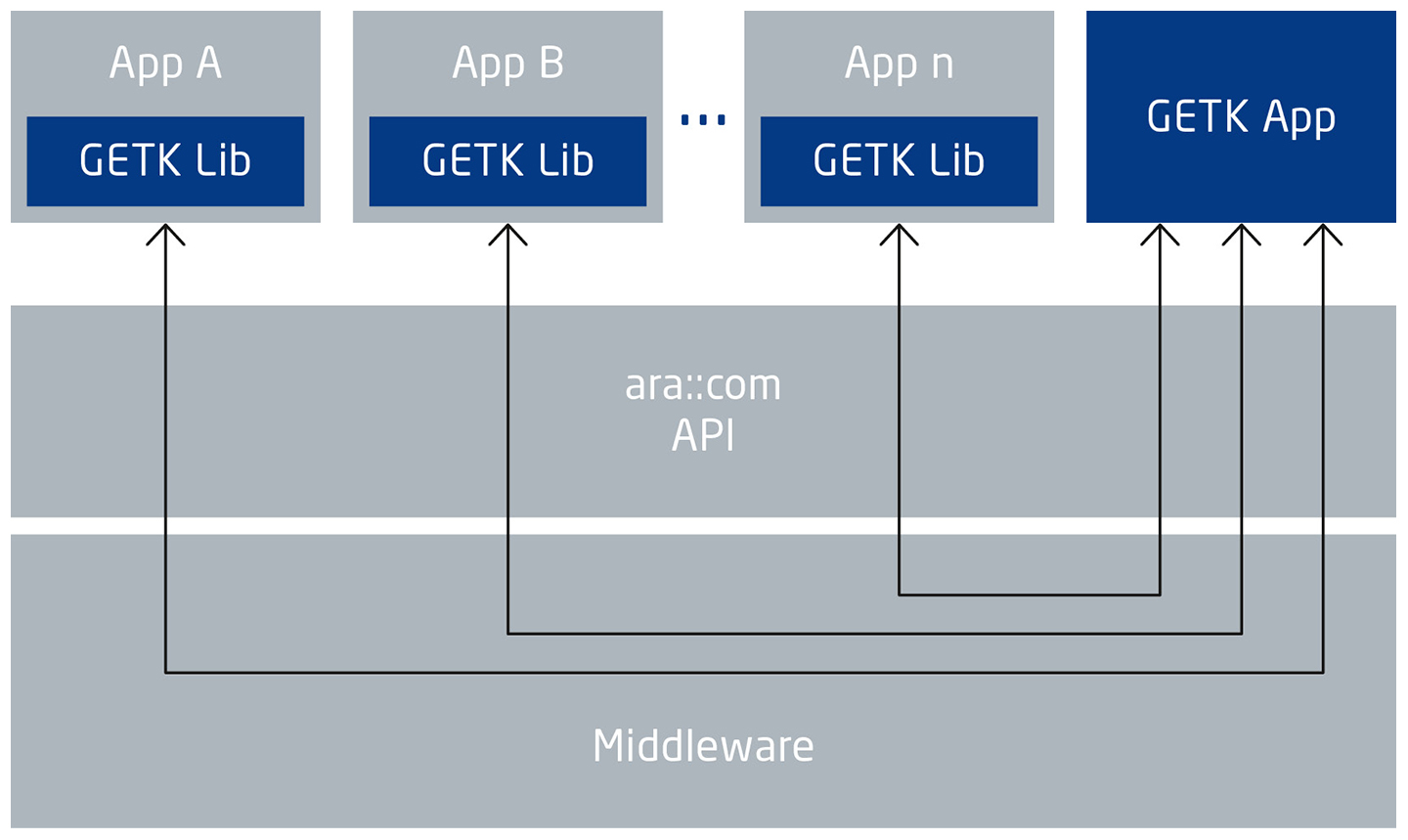
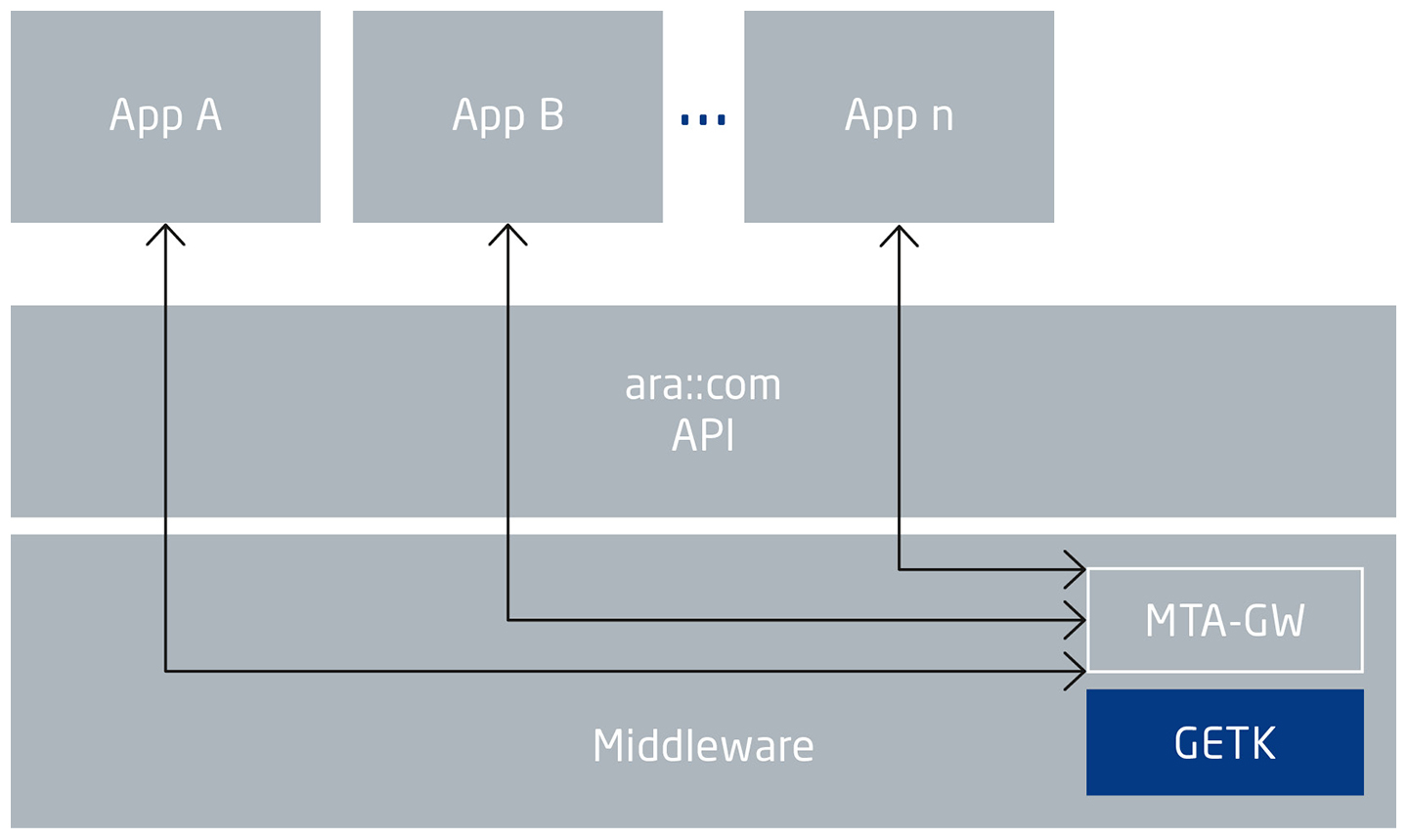
By enabling measurement data acquisition at an early stage of development, the ETAS V-GETK helps minimize costs and save time in the software function development process. Performance is dependent on the PC hardware. The more cores and processing power are available, the more data can be recorded via the virtual GETK. The solution is flexible when it comes to embedding it in the software environment: users can choose to make it available as a service on the AUTOSAR Adaptive interface ara::com (Fig. 3) or as a protocol driver in customer-specific middleware (Fig. 4).
The V-GETK is integrated into the ECU prototypes as software. This offers the advantage of using the high-performance Ethernet interfaces of industrial PCs for data output. In this way, the measurement data reaches a data logger directly or via the Ethernet network. The virtual GETK is managed via the ETAS SW Framework, in which the measurement data can also be visualized. Intuitive handling is supported by various modules for control and configuration such as the RALO (rapid logging) Manager and the RALO Recorder. Standard software tools and frameworks can also be connected – for example the robot operating system (ROS) and the automotive data and time-triggered framework (ADTF).
In-vehicle DAQ in the development phase
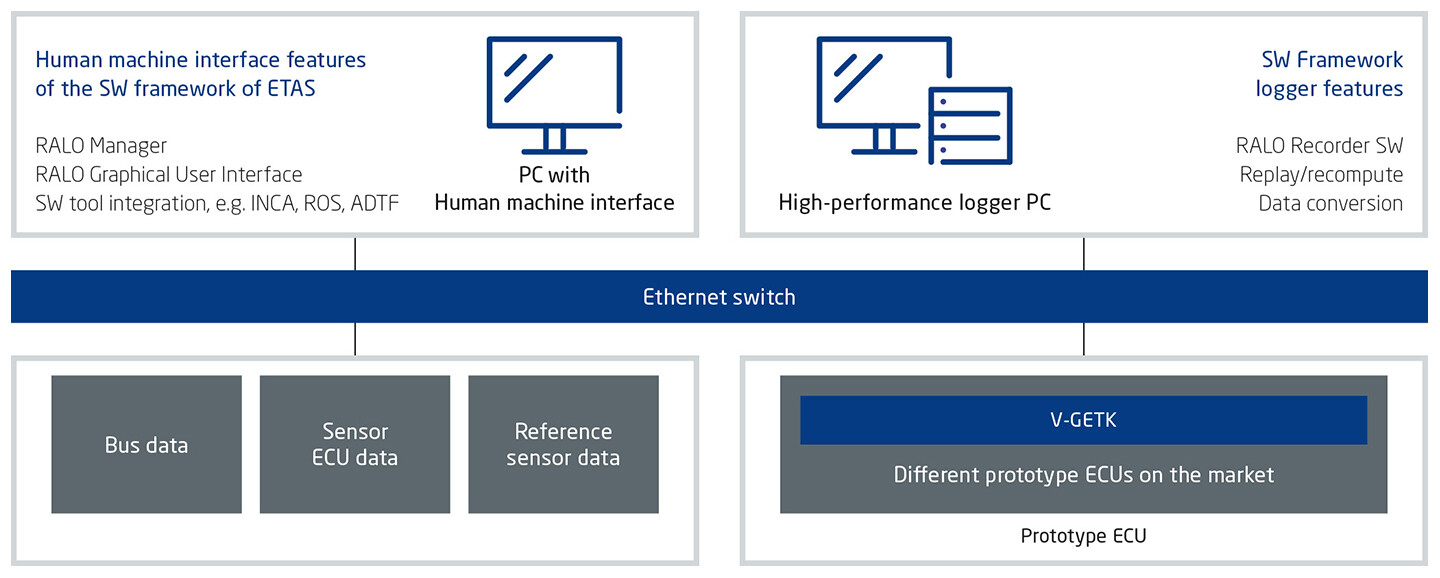
As soon as function developers have access to preproduction prototypes of the ECU and sensor hardware, they can make use of integrated measurement technology such as the ETAS ETK or GETK. This allows them to measure all the required data from the vehicle ECU in the course of test-drives or Hardware-in-the-Loop (HiL) tests. In ADAS projects, the focus is on raw data and internal data on the sensor level. Capabilities must be in place to handle data rates of 100 MB/s for radar sensors and up to 1 GB/s (for example for an 8-megapixel camera). It is also necessary to acquire data from traditional domains, ranging from powertrain, chassis, and infotainment through to connectivity. Reference data from ground-truth sensors and reference measurement systems (Fig. 5) are also required.
New measurement technology solutions are required to develop assistance functions into automated systems. In situations where dozens of sensors must seamlessly monitor their surroundings, the need for measurement data increases dramatically. Acquiring this data and transmitting it reliably requires a dedicated in-vehicle network architecture for the measurement technology, because data rates in the order of 6 to 15 GB/s can only be recorded cost-effectively using a scalable logger system that dynamically distributes the data streams to the available data sinks.
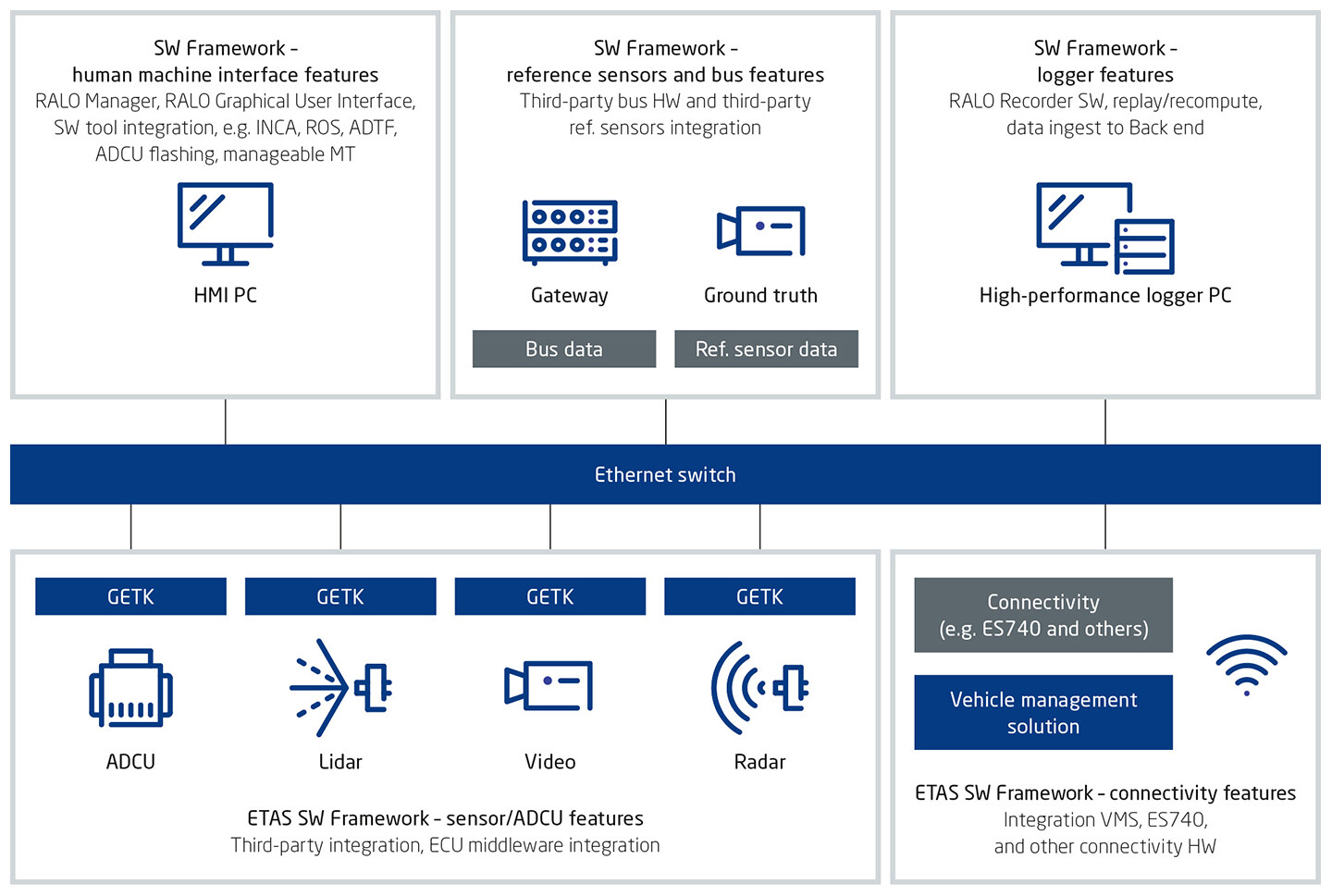
The ETAS portfolio includes a DAQ solution that is suitable for this purpose. It consists of the ETAS GETK family, the ETAS SW Framework, additional system components, and supplementary measurement modules. This scalable solution ensures a seamless development chain across all phases of the development of automated and semi-automated functions. The development results from the prototyping phase can be seamlessly transferred to subsequent phases. Integrated in the ECU hardware, the GETK is an excellent example of the consistently modular philosophy of the ETAS DAQ solution. In addition, data sources from microcontrollers (µC) with rates around 70 to 100 MB/s and from microprocessors (µP/SoC) with 2 to 8 GB/s per GETK can be integrated into the measurement network. Data is transmitted via the PCIe bus and accessed via direct memory access (DMA). The new measurement technology standard thus provides the basis for capturing enormous amounts of data in automation projects and reading them with high performance. The key to this is its scalability.
The ETAS SW Framework serves as the basis. It guarantees completely reliable and secure transfer of data from source to sink – and it efficiently distributes the data streams generated by the GETK to the available data loggers via 10-/40-/100-gigabit Ethernet. Data rates reach up to 8 GB/s per logger. The system also enables the integration of standard software frameworks such as ROS and ADTF across all development phases. This allows function developers to continue working with their preferred tools.
In-vehicle data acquisition in the post-SoP phase
In the future, access to data from sensors and ECUs must also be guaranteed after start of production (SoP) – for example for ongoing fleet validation. The ETAS solution provides developers with fully validated access to the measurement data available from vehicles in the field and to supplementary background data. Developers can also interact with vehicles via a cloud infrastructure, which allows manufacturers to continue developing and testing the software functions of automated driving even after SoP in order to continuously sharpen the senses of sensor-based systems.
Summary
The ETAS DAQ solution is the answer to the increasing demand for measurement data for efficient function development. The consistently modular, scalable approach provides developers with access to measurement data at every phase of vehicle development and allows powerful measurement technology to be integrated into the vehicle. One of the most decisive factors for time- and cost-efficient development is seamless integration from the prototype phase to the post-SOP phase. This starts from the prototype stage with the virtualized ETAS V-GETK, continues with the integrated GETK as soon as production ECU hardware is available, and extends all the way through to cloud-based data exchange with vehicles in the field. This capability for comprehensive data acquisition from laboratory to production vehicle provides function developers with new scope for validating the highly complex functions of automated driving in a way that will allow sensor systems to effectively replace human sensory perception in the future.
Authors
Dr. Patrick Nickel is an ADAS/HAD System Architect at ETAS GmbH.
Thomas Schöpfner is an ADAS/HAD Solution Manager at ETAS GmbH.
Further information
-
 Replacing human senses with measurement data Download
Replacing human senses with measurement data Download