計測データを五感の代わりに
ADAS開発のためのスケーラブルな計測データ収集

自動運転を可能にするには、センサシステムが人の知覚の代わりを務めなければなりません。そのようなシステムを設計し、開発のあらゆる段階でその機能をチェックするためには、計測データ全体に広くアクセスする必要があります。ETASの新しいモジュール式の計測テクノロジーは、そういったデータの収集や配布を支援します。
目と耳と経験、それに直感。車の運転にはそのすべてが必要です。けれども人は疲れて気が散ったり、反応が鈍くなったりすることがあるため、それを補う先進運転支援システム(ADAS)を導入しようとする気運は次第に高まってきており、このシステムは、数年のうちに自動運転を可能にするであろうと期待されています。ADASでは人の目と耳の代わりに、レーダー、ライダー、ビデオ、超音波センサを使って車両の周囲を監視します。
この複雑なセンサネットワークをうまく調整して連携させる役目を担うのが強力な電子制御ユニット(ECU)です。ECUはミリ秒単位のスピードで膨大なデータを処理し、運転戦略を導出しなければなりません。そのような複雑な制御戦略を効率よく開発できるように、ソフトウェア機能の開発は研究室へとその舞台を移しつつあり、実物のハードウェアを使った実験は、可能な限り仮想化で置き換えられるようになってきました。しかしそれには、実環境のデータを使ったモデルの妥当性確認が適切に実施できることが前提となります。それにはデータを効率的に収集できる信頼性の高い柔軟なツールが必要で、クラウドやバックエンドを介してデータにアクセスできることも不可欠です(図1)。
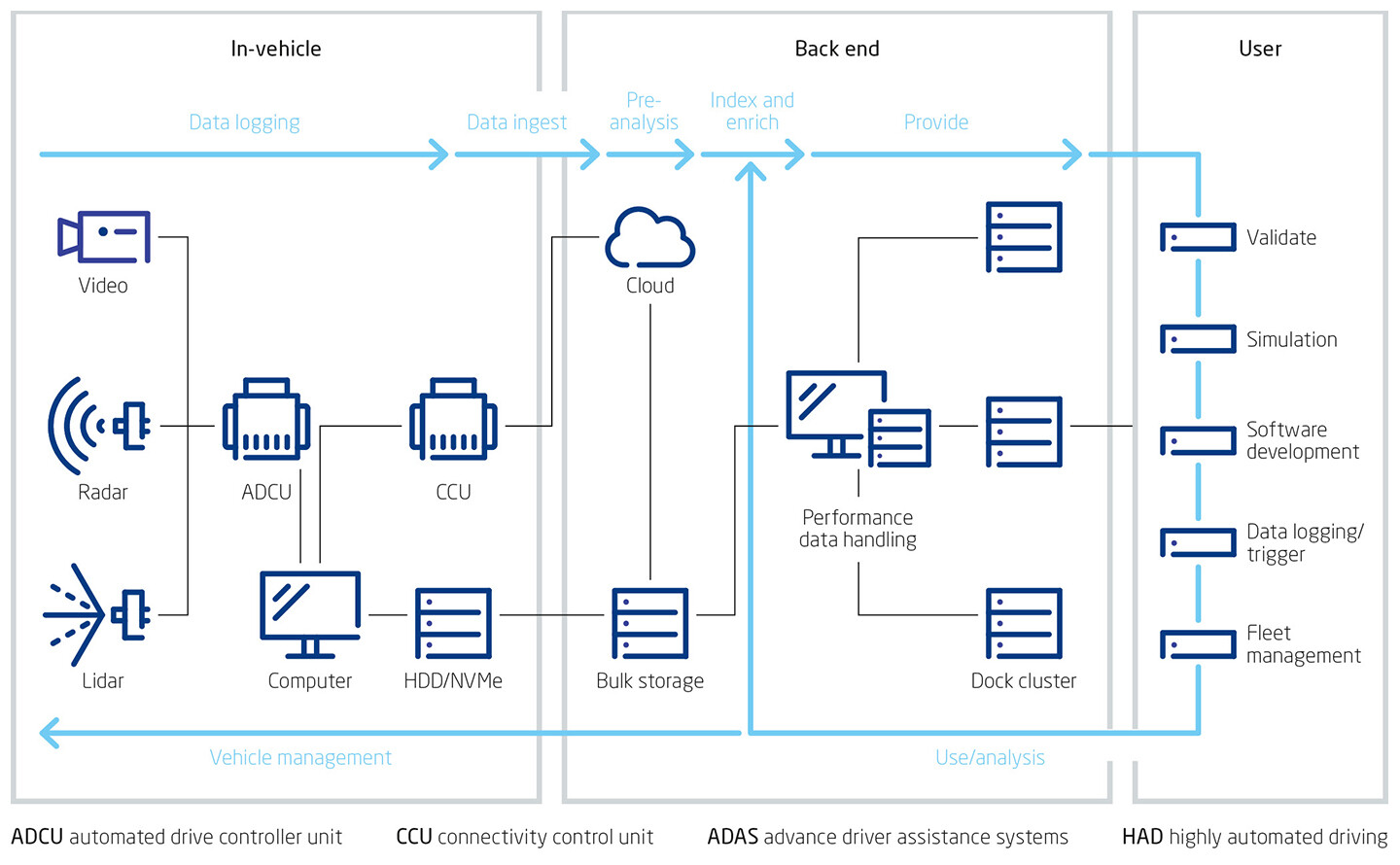
さらに、そうした開発環境は自動車メーカー(OEM)とサプライヤとに分割された車両開発プロセスに統合可能でなければならず、プロトタイピングから、さまざまな開発・機能拡張を経て、生産開始後のフリート管理に至るあらゆるフェーズに対応できなければなりません。どのフェーズにおいても、計測データを収集してアクセスするためのソリューションが必要です。構成が多様であるため、適切なデータ量には1秒あたり数メガバイト(MB)から数ギガバイト(GB)と幅があることも考慮しなくてはなりません。ETASは、これらの要件を満たすために特別に設計されたスケーラブルなモジュール式ソリューションのポートフォリオを提供しています。これらのソリューションは、すべてのフェーズにおける実車でのデータ計測を最適な方法で支援します。
プロトタイピングフェーズにおける実車データの収集
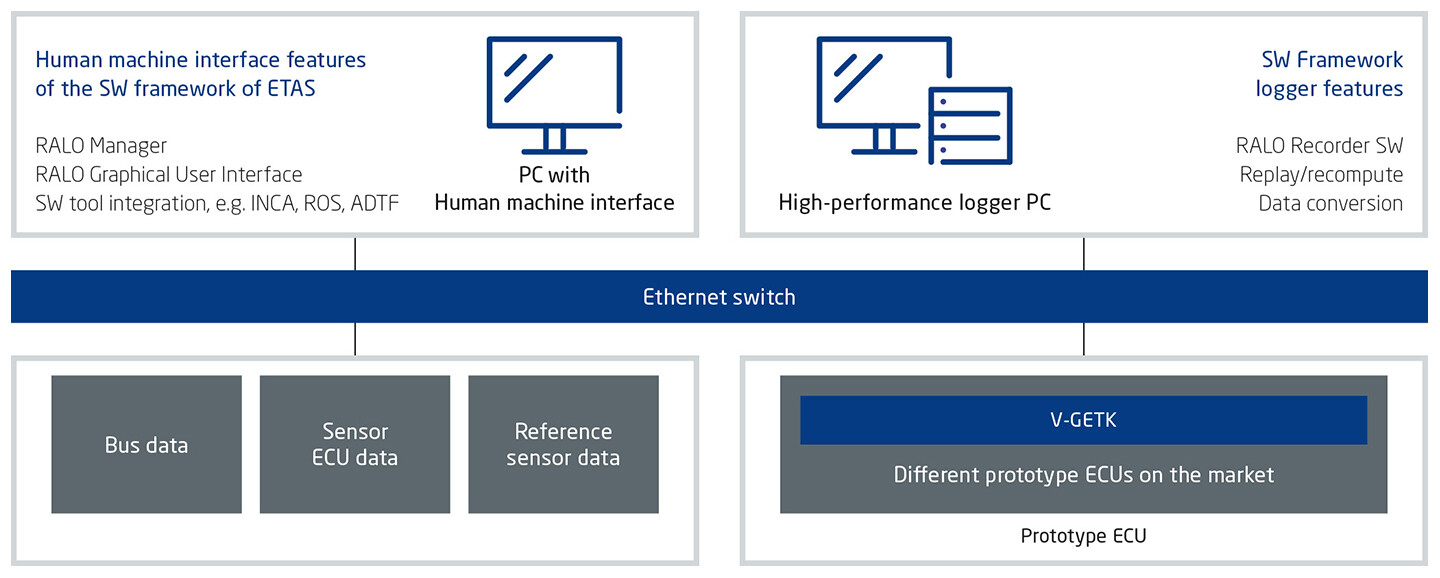
このフェーズでの実車計測は、仮想化された自動運転機能開発の妥当性確認に使用するデータベースのもとになるため、非常に重要な工程です。しかしながら、このフェーズにおいては量産用のECUやセンサハードウェアがまだ利用できないのが通例であるため、実車計測はこれまで成功していませんでした。一般には、早期段階の開発作業を進める目的で、シミュレートされたECUを実装した産業用コンピュータが使用されますが、そのようなECUのインターフェースや特性は量産用ハードウェアと異なるため、ETASの従来のハードウェア指向計測テクノロジーであるエミュレータテストプローブ(ETK)などは使用できません。そこで、このギャップを埋めてデータ計測をプロトタイピングフェーズから始められるようにするため、ETASは仮想GETK(V-GETK)を開発しました(図2)。
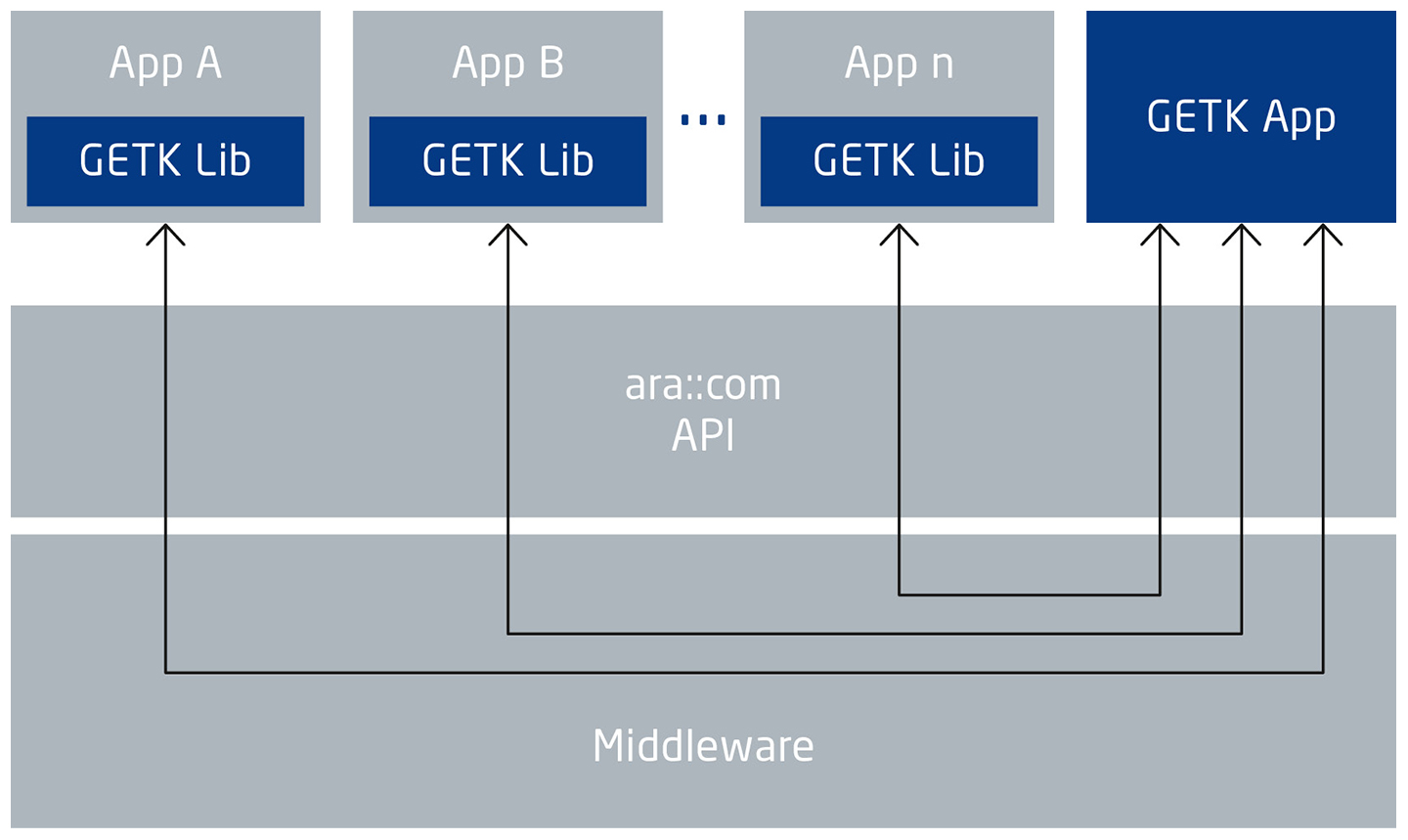
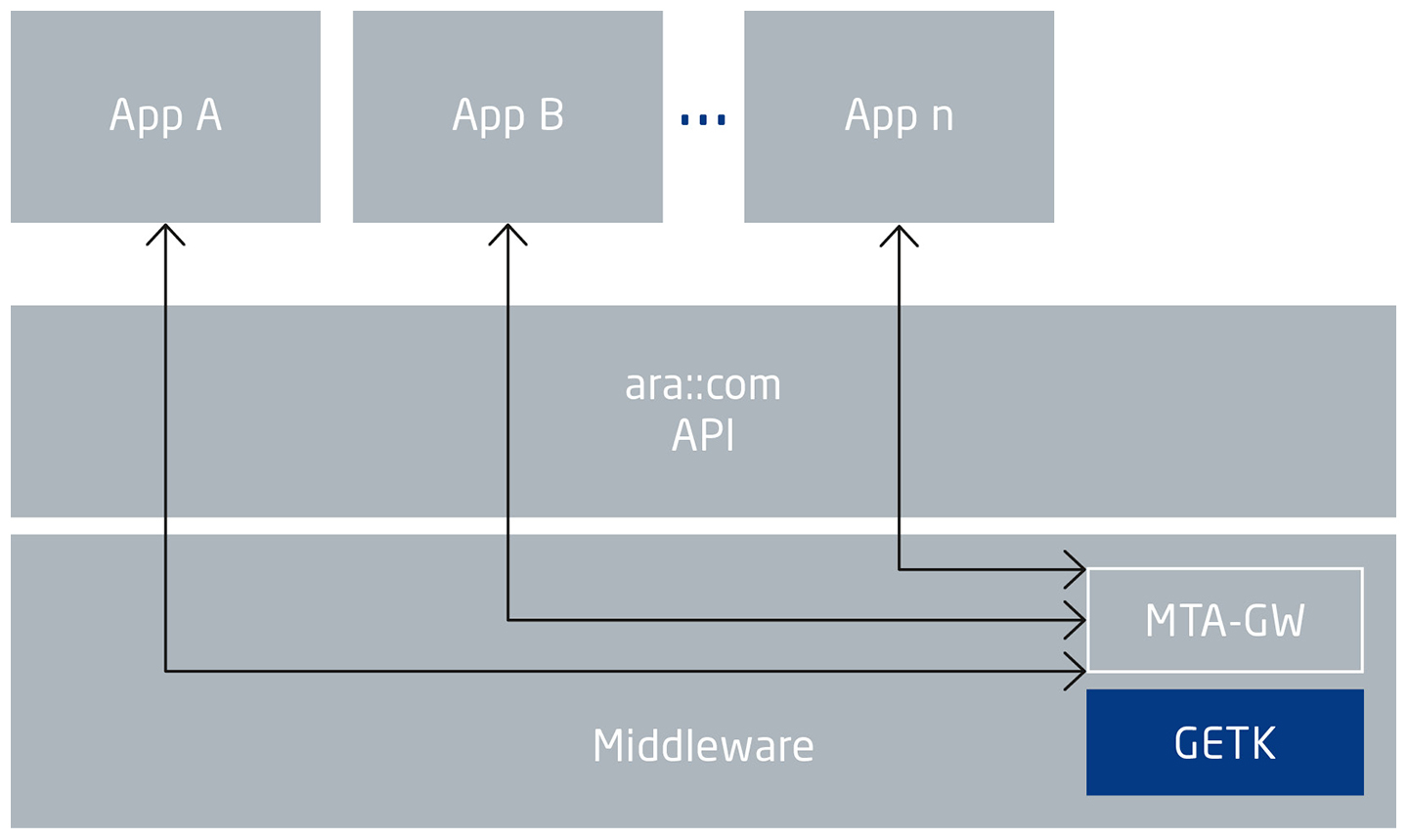
ETASのV-GETKは、開発早期からの計測データの収集を可能にし、ソフトウェア機能開発プロセスにおけるコストの最小化と時間の節約を支援します。パフォーマンスはPCのハードウェアに依存します。コア数が多く処理能力が高いほど、より多くのデータを仮想GETKを介して記録できます。このソリューションは柔軟にソフトウェア環境へ組み入れることができます。AUTOSAR Adaptiveのara::comインターフェースのサービスとして利用することもでき(図3)、ユーザー固有のミドルウェアにプロトコルドライバとして組み込むこともできます(図4)。
V-GETKはECUのプロトタイプにソフトウェアとして統合されます。これには、産業用PCの高性能イーサネットインターフェースをデータ出力に使用できるという利点があります。計測データはデータロガーへ直接、またはイーサネットネットワーク経由で送信されます。仮想GETKはETAS SW Frameworkで管理され、SW Frameworkではデータを可視化することもできます。 RALO(rapid logging)Manager、RALO Recorderなどの制御・設定用の各種モジュールは、直感的に操作することができ、ROS(robot operating system)、ADTF(automotive data and time-triggered framework)などの標準的なソフトウェアツールやフレームワークとの接続も可能です。
開発フェーズにおける実車計測
ECUやセンサハードウェアの試作プロトタイプが使用できるようになると、ETAS ETK、GETKなどの計測テクノロジーを活用できるようになり、必要なすべてのデータは、走行テストやハードウェアインザループ(HiL)テストにおいて車載ECUから計測することが可能になります。ADASプロジェクトの場合はセンサの生データと内部データが重視されますが、ここで必要とされるのは、レーダーセンサで100 MB/秒、最大で1 GB/秒(8メガピクセルのカメラの場合)のデータ処理速度を実現できる性能です。また、パワートレイン、シャーシ、インフォテインメントといった従来のドメインからもデータを取得する必要があり、グランドトゥルースセンサや基準測定システム(図5)からの基準データも必要です。
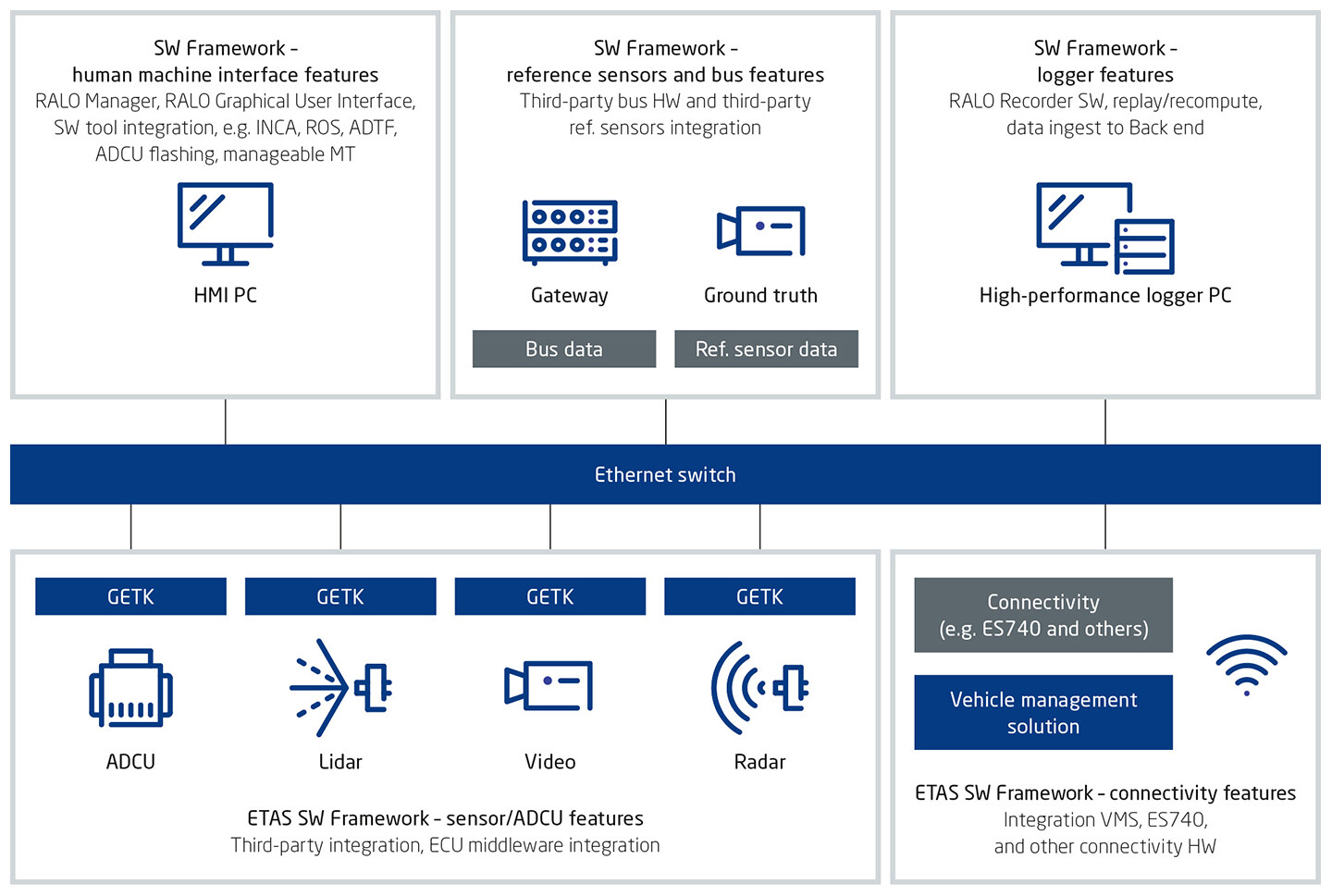
このように、数々の支援機能を自動化システムに組み入れるための新しい計測技術ソリューションが求められるようになっています。何十台ものセンサが周囲をシームレスに監視しなければならないといった場面では、計測データの重要性が著しく増大します。データの収集と転送を確実に行うには、専用の車載ネットワークアーキテクチャが必要です。6~15 GB/秒にもなる速度で転送されるデータを記録するには、スケーラブルなロガーシステムを使ってデータストリームを各データシンクへ分配することが、唯一の費用効率のよい方法だからです。
ETASのポートフォリオには、そのような目的に最適な計測ソリューションが含まれています。これは、ETAS GETKファミリーとETAS SW Frameworkに加え、各種システムコンポーネントと補足的な計測モジュールで構成されるものです。このスケーラブルなソリューションは、自動化・半自動化された各種機能のすべての開発フェーズにわたってシームレスな開発チェーンを実現でき、プロトタイピングフェーズにおける開発の成果物は、シームレスに次のフェーズへ転送できます。ECUハードウェアに統合されるGETKは、一貫したモジュール方式を目指しているETASの計測ソリューションの理念の典型例の1つです。また、転送速度が約70~100 MB/秒のマイクロコントローラ(μC)や2~8 GB/秒のマイクロプロセッサからのデータソースも、GETKを使って計測ネットワークに統合することができます。データはPCIeバスで転送され、DMA(直接メモリアクセス)によるアクセスが可能です。このような計測技術の新たな基準が提供する土台の上でこそ、自動化プロジェクトにおける巨大データを高効率で取得して読み込むことが可能になるのです。そしてその秘密はスケーラビリティにあります。
土台となるのはETAS SW Frameworkです。ソースからシンクへのデータ転送では最高レベルの信頼性とセキュリティが保証されます。また、GETKが生成するデータストリームは、10/40/100 GBのイーサネットでデータロガーへ効率よく分配されます。最大データ転送速度はロガー1台あたり8 GB/秒です。このシステムではROSやADTFのような標準のソフトウェアフレームワークの統合も、開発の全フェーズにわたって可能になります。これにより、機能開発者は好みのツールで作業を続けることができます。
生産開始後フェーズにおける実車データ収集
将来的には、生産開始(SoP)後も継続的なフリートの妥当性確認などのため、センサやECUからのデータアクセスが保証されなくてはなりません。ETASのソリューションがあれば、実地で車両から得た計測データや補足的な背景データに、十分に妥当性が確認された手段によってアクセスすることができます。クラウドインフラストラクチャを介してインタラクティブに車両と対話することにより、車両メーカーはSoP後も自動運転ソフトウェア機能の開発・テストを継続して実施し、センサベースのシステムの五感を一層鋭く研ぎ澄ましていくことができるのです。
まとめ
機能開発を効率化する計測データの需要の高まり、それに応えるのがETASの計測ソリューションです。一貫したモジュール方式のスケーラブルなアプローチにより、開発者はあらゆるフェーズで測定データにアクセスでき、強力な測定技術を車両に組み込むことができます。開発の時間効率と費用効率を高めるための最も決定的な要因の1つは、プロトタイプフェーズからSoP後フェーズまでのシームレスな統合にあります。それは仮想化されたETAS V-GETKを用いたプロトタイピングに始まり、量産用ECUハードウェアが利用可能になった後はECUに統合されたGETKに引き継がれ、あらゆるステージを経て、走行中の車両とのクラウドベースのデータ交換にまで至ります。研究室から量産向けの実車までを網羅する包括的なデータ収集機能は、機能開発者にとっての新たな境地を開きます。将来、高度で複雑な自動運転の諸機能の妥当性確認作業においては、センサシステムが人の知覚に代わるものとして活躍することになるでしょう。
執筆者
Dr. Patrick Nickel、ETAS GmbH
ADAS/HAD担当システムアーキテクト
Thomas Schöpfner、ETAS GmbH
ADAS/HAD担当ソリューションマネージャ
もっと見る
-
 計測データを五感の代わりに ダウンロード
計測データを五感の代わりに ダウンロード