Next generation large scale prototyping
ETAS comprehensively supports Nissan’s model-based development

Model-based design/development (MBD) and Rapid Control Prototyping (RCP) are essential for developing high quality control software with higher efficiency. However, in the case of large scale software – such as engine control – up to now, RCP could only be used for some parts of the development process. Nissan Motor Corporation and ETAS took on the challenge of jointly developing an RCP environment for large scale control software models for series production projects.
Handling increasing scale and complexity
In order to comply with ever-increasing environmental regulations, engine control software has become larger and more complex than ever before. To master this challenge, Nissan started to introduce MBD in the 1990s with the aim of creating an environment in which software can be developed with higher quality and in a shorter period of time. Since 2019, Nissan has been using its third-generation MBD process in about 85 percent of the company’s projects.
Recently, Nissan has redesigned its engine control software, adopting a new architecture called Nissan Engine Management System (N-EMS). But N-EMS still had room for improvement, especially when it came to efficiencies across the entire alliance group. This alliance also includes Renault in France, where the software architecture is different.
In addition, the AUTOSAR standard is used comprehensively to further improve development efficiency and significantly reduce development costs. Nissan is currently working with alliance companies such as Renault to define an AUTOSAR-based Alliance Engine Management System (A-EMS), featuring a common global control software architecture and fourth-generation MBD process.
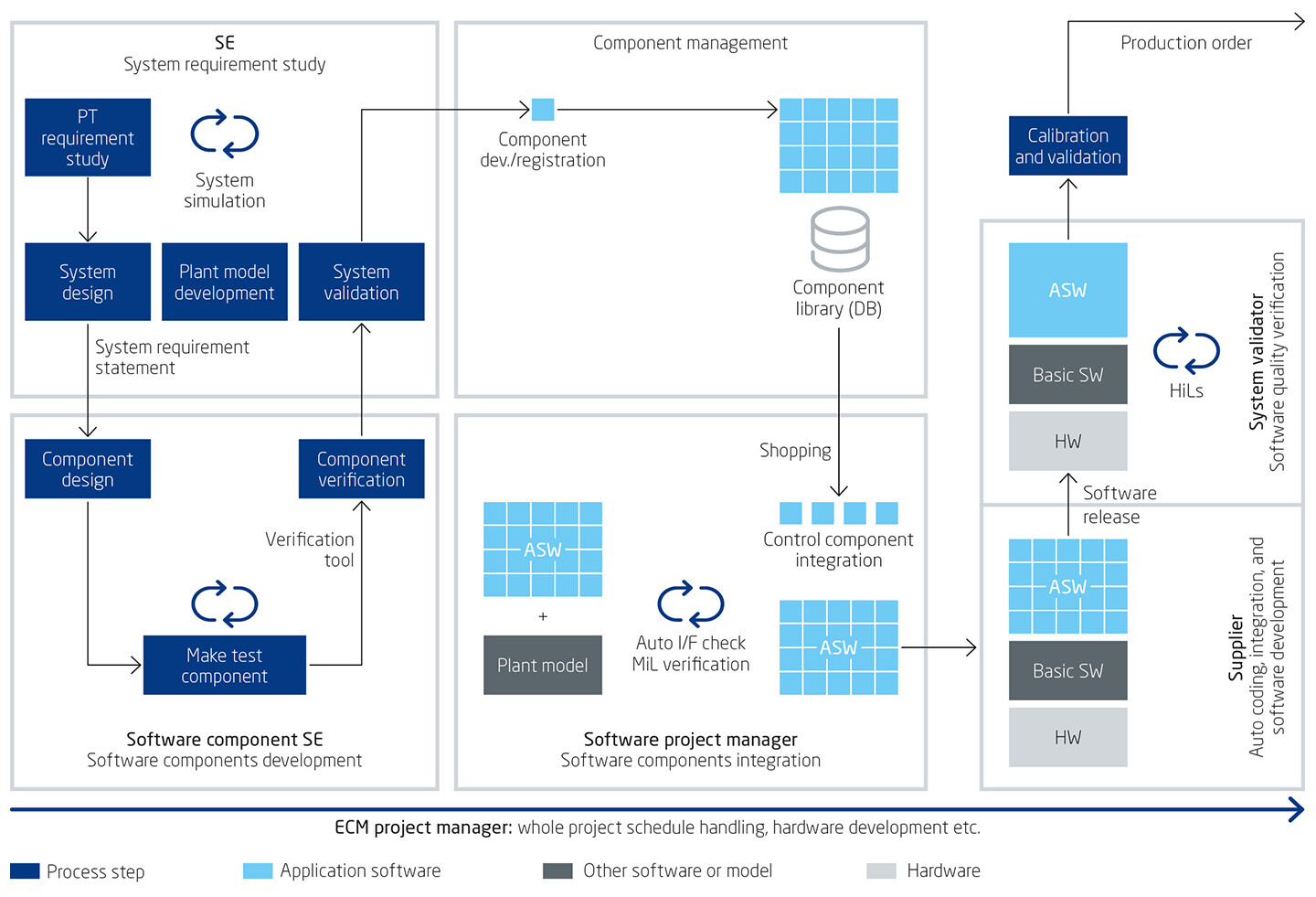
Double V-cycle enables sharing and effective use of models
Nissan has adopted the double V-cycle, a hierarchical development process that combines two MBD V-shaped cycles (Fig. 1). In the first V-cycle, a model of reusable, validated software components (SWCs) is developed. This model is registered in a common database library and is shared in development projects within the company and among alliance companies.
The second V-cycle assembles the control software according to N-EMS and A-EMS rules and processes. The application software (ASW), which greatly affects engine performance, is developed independently by each automaker.
The basic software (BSW) and OS which are not part of the immediate project scope are designed or selected by suppliers. The automaker then creates a model of the entire ASW, called a “template“ by combining the parts in the library. The supplier incorporates this template model into the BSW and OS and automatically generates serial production code.
Develop an evaluation process
So far, there was no RCP environment for the complex entire ASW. Hiroshi Kato, senior manager of the EMS Control Technology Development Group, Nissan Motor Corporation, explains, “We decided to establish an evaluation process and toolchain to create an RCP-suitable engine control ASW, developing the fourth generation of MBD in parallel.“ If a bypass for the entire ASW, called “full bypass,“ could be realized, Hardware-in-the-Loop (HiL) tests or actual device evaluation for the entire ASW would be possible, resulting in a dramatic shortening of the evaluation period and reduction of development cost. Also, by seamlessly connecting to the “full Model-in-the-Loop (MiL)” environment for the entire ASW, consistent testing would become possible.
Harmonizing the toolchain, with INCA as an essential component
Nissan‘s previous partial bypass evaluation had problems with the connection of tools from different vendors. A unified toolchain with all tools from one vendor would create efficiencies by providing a consistent usage method for all users during calibration and validation.
“There are two tools in the MBD control development process that are hard to replace. The first is MATLAB®/Simulink® from MathWorks for model development. The other is INCA from ETAS, which has been the standard tool used by the powertrain industry for many years,” says Kato. Using MATLAB®/Simulink® and INCA was also a requirement from Renault.
Keeping INCA was not the only reason for Nissan to choose ETAS as its co-development partner. Nissan also has a high regard for ETAS as a vendor who could fulfill all requirements. According to Kato, “Many vendors only bring proposals that include products they can offer themselves. However, ETAS set objective evaluation criteria that could be disadvantageous to their company, and if one recommendation didn’t work, they would immediately suggest a second solution. So we had high expectations of them as a reliable partner.”
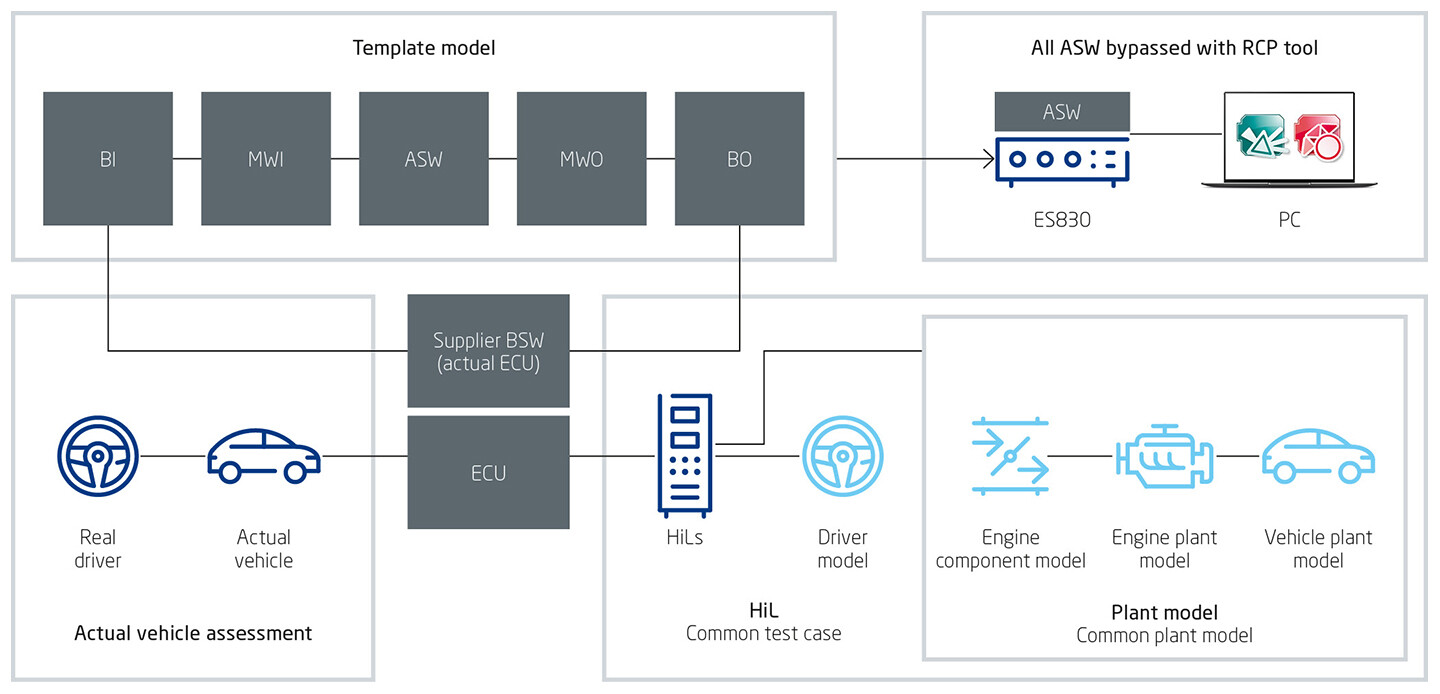
The four key points for success
There were four key points to realize this full bypass RCP evaluation process and toolchain for a whole project, which contained more than 1,300 models (Fig. 2). The first point was the processing performance of the RCP tool. Among ETAS’ RCP tools, the potential candidates were the ES910 and the more powerful ES830, which had only just been released at the time of the study. The second was the capabilities of the communication interface. Considering the amount of data to be transferred between the ASW and the BSW, the developers decided that ETK, XETK, and FETK would be the possible options for the ECU interface.
Looking back on the tool selection process, Kato says, “At that time, we were optimistic that we could run the model even without using very high-performance hardware. When we actually tested the ES910, we discovered that we needed much more processing than we had anticipated. So during the weekly meetings with ETAS we discussed alternatives and the pros and cons of using the more powerful ES830. ETAS was still in the final stages of developing the ES830, but we decided to use it as an early adopter and perfect its development together.” We also decided to use the XETK interface for fast data transfer.
The third key point was improving the speed and efficiency when building the development environment. There were many things to do, such as global standardization of the architecture, and Nissan suffered from a lack of resources. “If it hadn’t been for the quick and accurate support we received from ETAS, we wouldn’t have been able to complete the project,” says Kato.
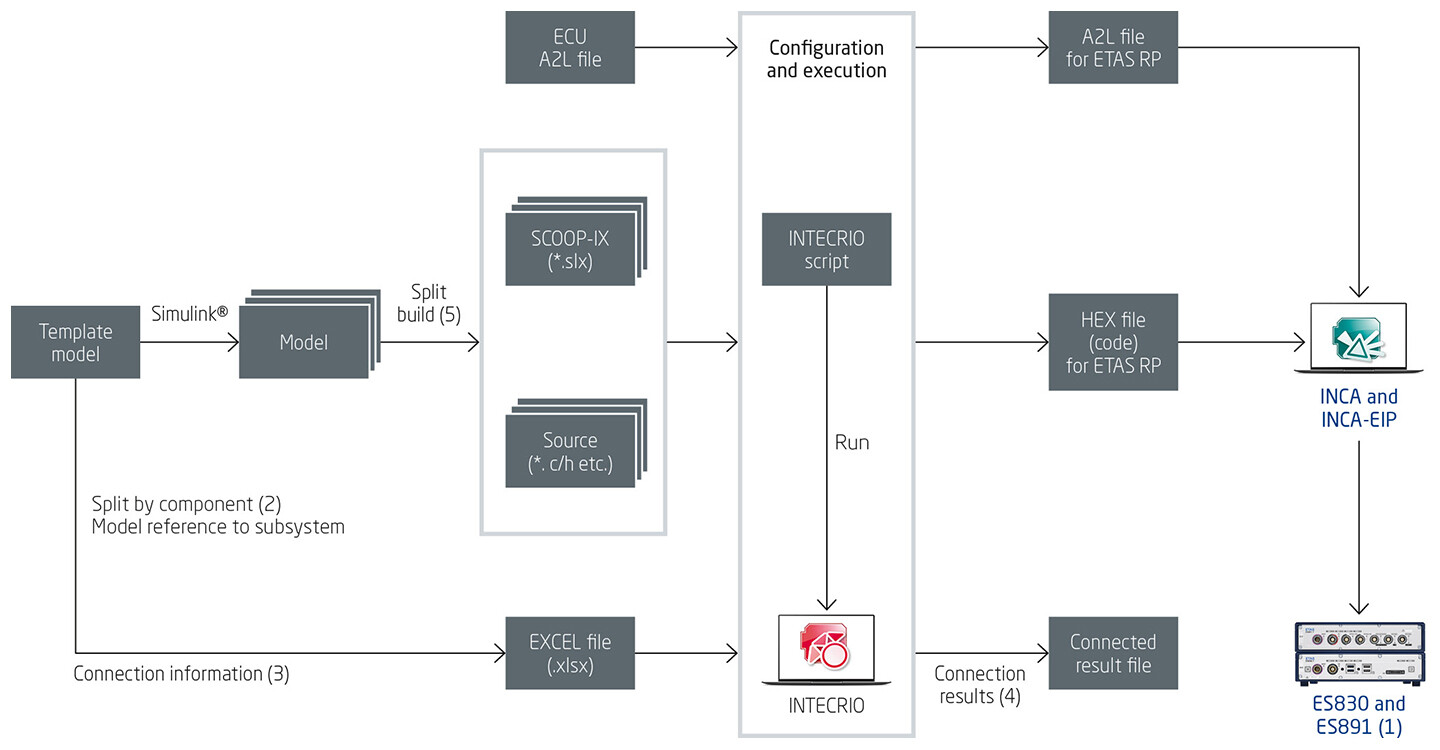
In order to further increase evaluation efficiency, the team jointly developed a number of features (Fig. 3):
- A mechanism that would allow developers to build only the changed part when the model was changed (1 and 2)
- A mechanism to extract the connection information between models that was required for integration with INTECRIO from the template model (3)
- A function to check the connection result such as the presence of unconnected ports (4)
- A function to handle bypass-side calibration variables with only a label name in the same way as on the ECU side (5) and script automation for each process step
The fourth key point was compatibility with AUTOSAR. Using this standard, the bypass was implemented at a common level to ensure cooperation between automaker and supplier platforms for ASW and BSW. The non-volatile memory in the ES830 was used for RCP. The existing third-party interfaces were replaced by a simplified model for supplier diagnosis and data monitoring.
Evolving together as win-win partners
By coming together for this joint development, Nissan and ETAS were able to build an unprecedented RCP for large scale models that can handle the overall engine control application and can be applied to serial production projects.
Users can now perform simulations and bypasses in the same way that they collect measurement data, with the familiar INCA user interface. ETAS fully supported users, such as by providing a manual for the evaluation work procedures and tool operating methods. Kato says, “We have already begun applying the evaluation environment to our latest engine projects and we are beginning to see the effects of improved development speed, improved quality, and reduced development costs. Going forward, we intend to expand to e-POWER and EV development of Nissan original HEVs, so I expect that we will gain even more clear benefits when we fully utilize the technology.”
The joint development of full bypass RCP with Nissan was also a big challenge for ETAS. Working to meet the cutting-edge technological requirements of this project, ETAS engineers and developers gained experience in the issues they will face in the future and were able to improve the ES830 and other RCP-related products. This win-win relationship between an automaker and ETAS will serve as a driving force to further evolve the development environment of automobiles.
Interviewee
Hiroshi Kato is Senior Manager of the EMS Control Technology Development Group, Powertrain/EV Control Development Department, Powertrain/EV Technology Development Division at Nissan Motor Corporation.
Further information
-
 Next generation large scale prototyping Download
Next generation large scale prototyping Download