ETAS s’engage, lors du développement et de la maintenance de Standardized Utility Modules, à ce que ceux-ci soient compatibles avec toutes les mises à jour de GM. Forts de notre longue expérience avec AUTOSAR, nous travaillons de manière proactive aux côtés de GM pour continuer à affiner les spécifications.
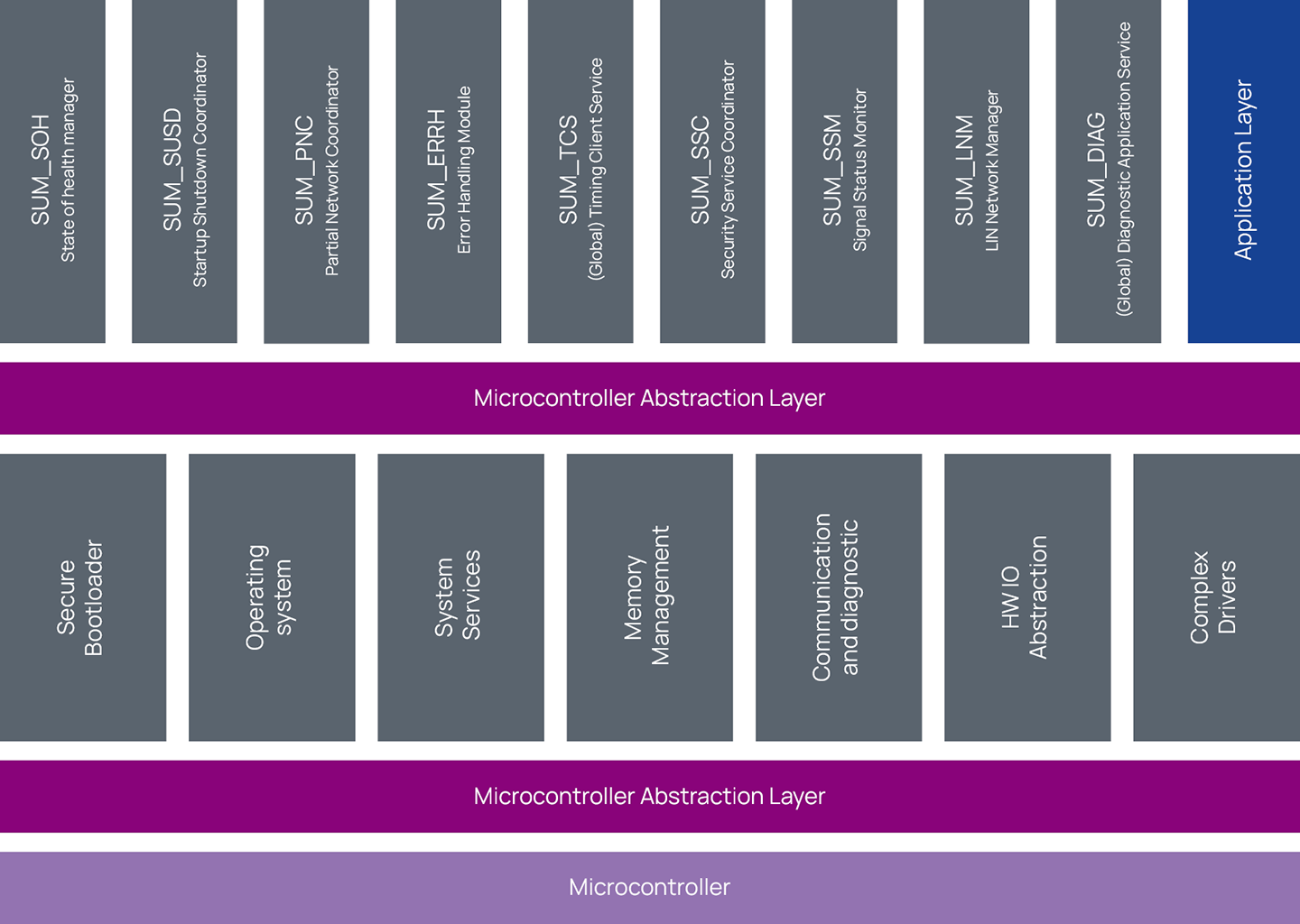
Les RTA-SUM d’ETAS comprennent les SUM suivants
SUM_SUSD – Startup Shutdown Coordinator (coordinateur de démarrage/arrêt)
Le SUM_SUSD offre les fonctions suivantes : Gestionnaire d’états d’application, démarrage/arrêt d’application SW-C, moniteur de tension de fonctionnement/batterie et Wakeup Reason DID. Pour comprendre les fonctions offertes par le SUM_SUSD, il est nécessaire de comprendre le fonctionnement des modules BSW EcuM et BswM tel que défini par AUTOSAR.
SUM_PNC - Partial Network Coordinator (coordinateur de réseau partiel)
Le SUM_PNC gère tous les services BSW relatifs aux réseaux partiels (Partial Networks, PN) pour un ECU faisant partie d’un PN. Il doit être implémenté dans tous les ECU faisant partie d’un PN. Cela permet à tous les autres SW-C de fonctionner indépendamment de la source de données.
SUM_ERRH - Error Handling Module (module de traitement des erreurs)
Les SUM_ERRH est informé d’erreurs générées par des erreurs de production BSW ou des événements d’erreur SUM. Il filtre les événements à l’aide de l’algorithme anti-rebond approprié. Sur la base de ces résultats, SUM_ERRH informe le module Dem (Diagnostic Event Manager) d’un événement et du résultat de test positif ou négatif pour cet événement. Le module est responsable du maintien de l’octet d’état.
SUM_TCS - (Global) Timing Client Service (service d’horodatage)
Le SUM_TCS est en premier lieu destiné à fournir un horodatage synchronisé pour l’enregistrement de date étendu d’un DTC dans tous les ECU désignés comme TS_Slave. Le SUM_TCS n’est pas destiné à assurer des fonctions de commande ou à fournir des données consultables par le conducteur/les passagers du véhicule.
Le SUM_TCS reçoit, via le bus de communication de données série, un signal (TimeSyncMessage) provenant d’un ECU qui fait office d’horloge maître (TS_Master). La résolution et le taux de transfert du signal d’horloge maître sont définis par l’équipe de diagnostic.
SUM_SSC - Security Service Coordinator (coordinateur de service de sécurité)
Le SUM_SSC est la principale interface du SUM vers le BSW CryptoStack et gère donc tous les services BSW ayant trait à la sécurité. Le SUM_SSC est destiné à la mise en œuvre de toutes les fonctionnalités liées à la sécurité telles que l’authentification de messages, le déblocage de sécurité ECU et la mise à disposition de clés de sécurité périphériques. Le support de toutes ces fonctions dépend de la disponibilité du HSM sur l’ECU.
SUM_SSM - Signal Status Monitor (moniteur d’état de signal)
Le SUM_SSM est destiné à définir une implémentation standard afin d’interpréter les différentes indications d’état de valeurs de données associées aux signaux de données série et à fournir une interface cohérente au logiciel fonctionnel. Le but du SUM_SSM est de traiter les informations d’état relatives à l’intégrité du signal et à l’intégrité de la source des signaux reçus.
L’état d’intégrité du signal est déterminé en interprétant un "drapeau" ou une valeur spéciale indiquant si les signaux ayant été reçus avec succès peuvent être utilisés par le SW-C local. L’état d’intégrité de la source est déterminé en recherchant d’éventuelles erreurs de transmission des émetteurs dues à des défauts affectant la couche physique.
Ces erreurs peuvent utiliser des stratégies de traitement de défauts spécifiques à l’ECU ou à la fonction. Le SUM_SSM met en œuvre un ensemble de mécanismes standardisés utilisés par les récepteurs de signaux de données série pour accepter ou rejeter les valeurs de données du signal.
SUM_LNM - LIN Network Manager (gestionnaire de réseau LIN)
Le SUM_LNM gère les interactions avec les services BSW liées à la gestion du réseau LIN pour un ECU qui est maître d’un réseau LIN. Il existe un SUM_LNM par réseau. Ainsi, si un ECU est par exemple maître LIN pour trois réseaux LIN, cet ECU doit disposer de trois structures logicielles SUM_LNM indépendantes contrôlant chacune un réseau LIN.
SUM_DIAG - (Global) Diagnostic Application Service (service d’application de diagnostic)
Le SUM_DIAG est en premier lieu destiné à être utilisé pour implémenter des fonctionnalités de diagnostic au niveau applicatif telles que la vérification des prérequis fabricant pour plusieurs services UDS, la gestion de la valeur du MEC (Manufacturer Enable Counter) et la gestion du drapeau d’état de la programmation OTA (Over-the-Air).
SUM_SOH – State of Health Manager (gestionnaire d’état de santé)
Le SUM_SOH offre les fonctionnalités nécessaires pour assurer la surveillance et le reporting relatif aux multiples facettes de l’état opérationnel des systèmes de communication ECU, du matériel, du système d’exploitation et des composants logiciels. En mettant en œuvre des fonctions logicielles appelées moniteurs de fiabilité, le SUM_SOH surveille les événements de réinitialisation, les défauts relatifs à la mémoire non volatile ou au système d’exploitation, les temporisations à l’arrêt, les événements de session de communication et les états d’entités surveillées par le gestionnaire watchdog. Le SUM_SOH fournit des données concernant des événements surveillés par des DID ad hoc.