기능 한눈에 보기
- 작동(WP) 및 참조 페이지(RP)가 다른 ETK 동적 에뮬레이션 모드에서 캘리브레이션
- 데이터베이스: 참조된 데이터 세트만 내보내기
- MATLAB® / Simulink® 인터페이스: 새로운 버전 및 기능 향상 지원
- Service Pack Installer에 추가된 INCA-TOUCH
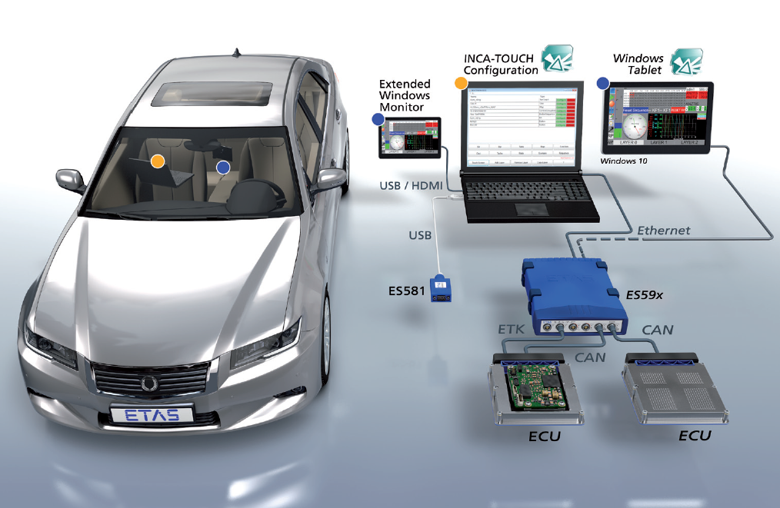
작동 및 참조 페이지가 다른 ETK 동적 에뮬레이션 모드에서의 캘리브레이션
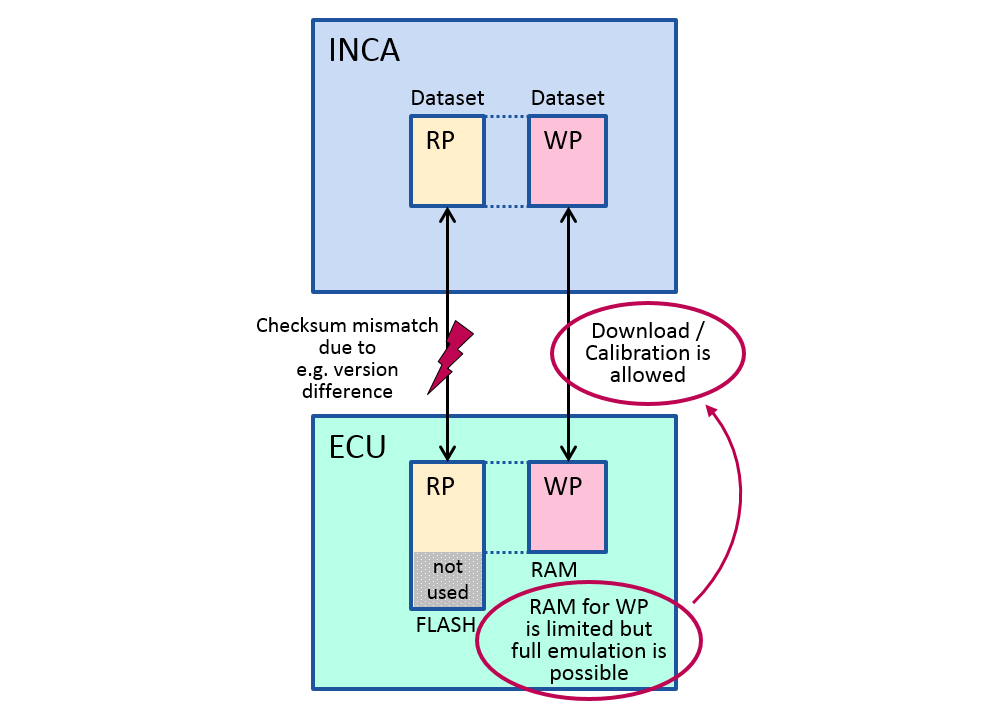
기존에는 ETK 동적 에뮬레이션 모드의 캘리브레이션을 위해서 ECU 및 INCA에 동일한 데이터가 있는 참조 페이지가 필요했습니다. 그러나 INCA SP5는 실험에서 요구되는 모든 캘리브레이션 데이터가 에뮬레이션 RAM에 적합하다면 참조 페이지 (RP)가 다른 경우에도 작업 페이지 (WP)에서 캘리브레이션할 수 있습니다.
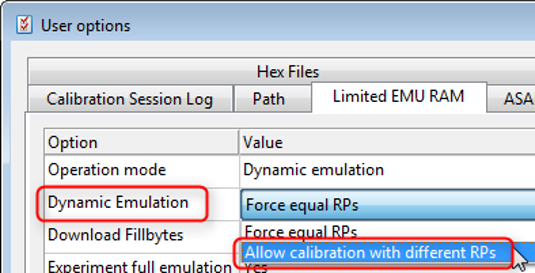
레코딩 작업 시, INCA는 RP, WP 또는 둘 다 다른 경우 MDF 파일에 코멘트를 남겨 줍니다. 이를 통해 기록된 캘리브레이션 값이 ECU 값과 일치하지 않을 수 있음을 사용자에게 알려줍니다. 이 기능을 사용하기 위해 아래와 같은 INCA 사용자 옵션을 "동적 에뮬레이션"= "다른 RP로 캘리브레이션 허용" 으로 설정하여야 합니다.
데이터베이스: 참조된 데이터 세트만 내보내기
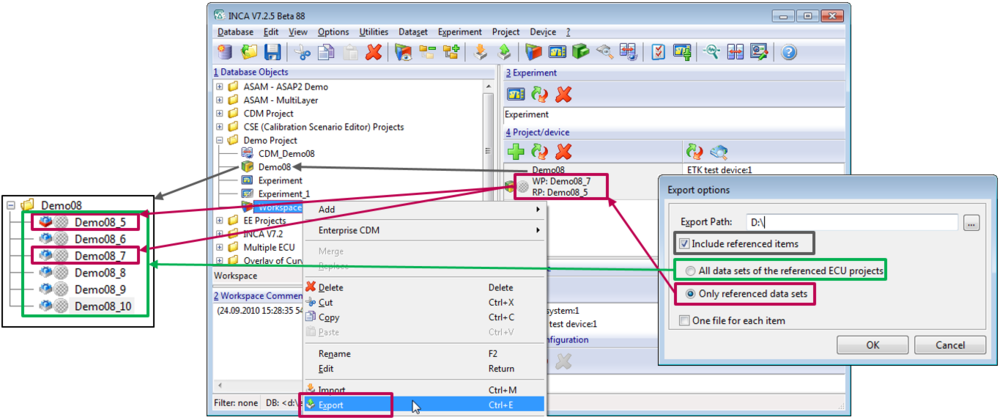
INCA 워크 스페이스를 export 할 때 참조하고 있는 ECU 프로젝트의 모든 데이터 세트를 내보낼 것인지 또는 워크 스페이스에서 사용하고 있는 데이터 세트만 export 할 지 결정할 수 있습니다.
MATLAB® / Simulink® 인터페이스: 새로운 버전 및 기능 향상 지원
이제 INCA add-ons INCA-SIP 및 INCA-MIP는 MATLAB® 2017a도 지원합니다. 또한 INCA-MIP는 MATLAB® 2016a 및 2016b와 호환됩니다.
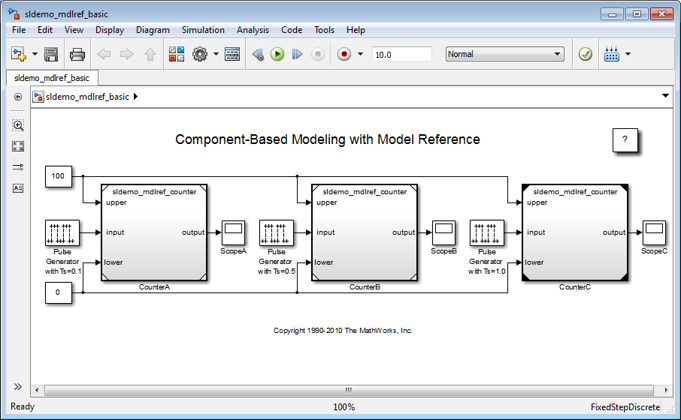
INCA-SIP에는 다음과 같은 Simulink® 기능이 추가되었습니다. 모델 블록을 사용하여 모델을 서로 포함시킬 수 있습니다. 모델 블록의 각 인스턴스는 referenced 모델이라고 하는 다른 모델에 대한 참조를 나타냅니다. 시뮬레이션 및 코드 생성을 위한 referenced 모델은 참조된 모델 블록을 효과적으로 대체합니다. referenced 모델을 포함하는 모델은 parent 모델입니다. parent 및 referenced 모델의 모음은 model reference hierarchy 을 구성합니다.
서비스 팩 설치 프로그램에 INCA-TOUCH 추가

INCA-TOUCH AddOn 설치 파일은 이제 INCA 서비스 팩 설치 프로그램에 포함 되어 있습니다. 따라서 INCA-TOUCH add-on과 설치된 INCA 버전 간의 호환성이 보장됩니다.