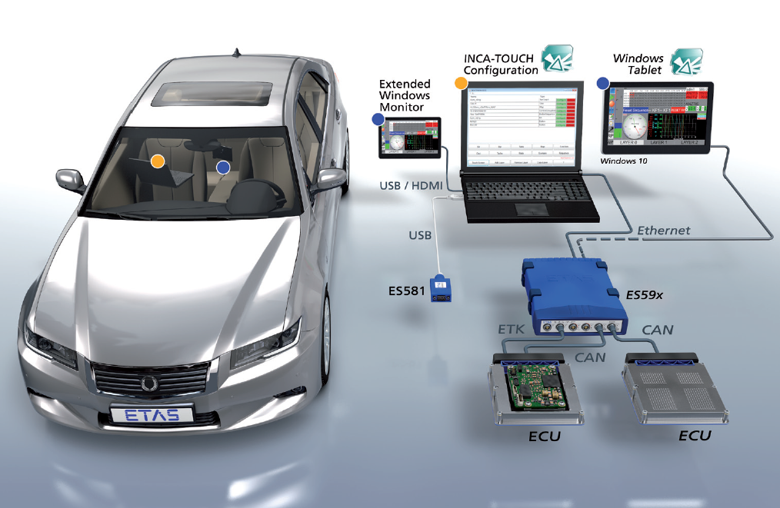
Aperçu des fonctions
- Calibration en mode de fonctionnement ETK « émulation dynamique » avec des pages de travail qui diffèrent des pages de référence
- Base de données : export des seuls jeux de données référencés
- Interface MATLAB®/Simulink® : prise en charge de nouvelles versions et améliorations fonctionnelles
- Ajout d’INCA-TOUCH au Service Pack Installer
Calibration en mode de fonctionnement ETK « émulation dynamique » avec des pages de travail qui diffèrent des pages de référence
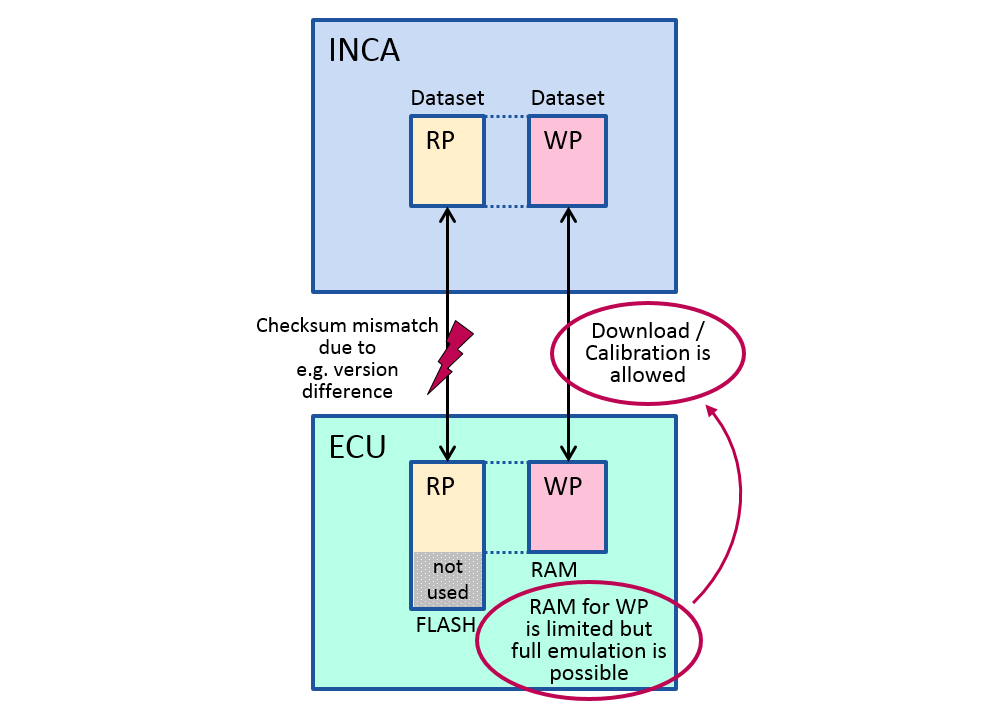
Jusqu’à présent, la calibration en mode de fonctionnement ETK « émulation dynamique » présupposait que les pages de référence soient identiques dans le calculateur et dans INCA. A partir de SP5, INCA autorise la calibration sur la page de travail (WP) même si les pages de travail diffèrent des pages de référence (RP). Il faut pour ce faire que toutes les données de calibration requises pour l’expérimentation puissent être chargées dans la RAM d’émulation.
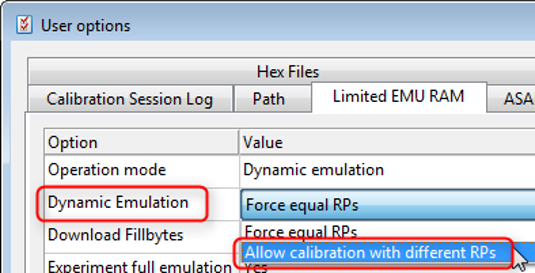
Lors de l’enregistrement, INCA inscrit un commentaire dans le fichier MDF si les pages de référence et/ou les pages de travail sont différentes. L’utilisateur est ainsi informé que les valeurs de calibration sont susceptibles de ne pas correspondre à celles du calculateur. La fonction est activée en choisissant l’option « Allow calibration with different RPs » dans le champ « Dynamic Emulation ».
Base de données : export des seuls jeux de données référencés
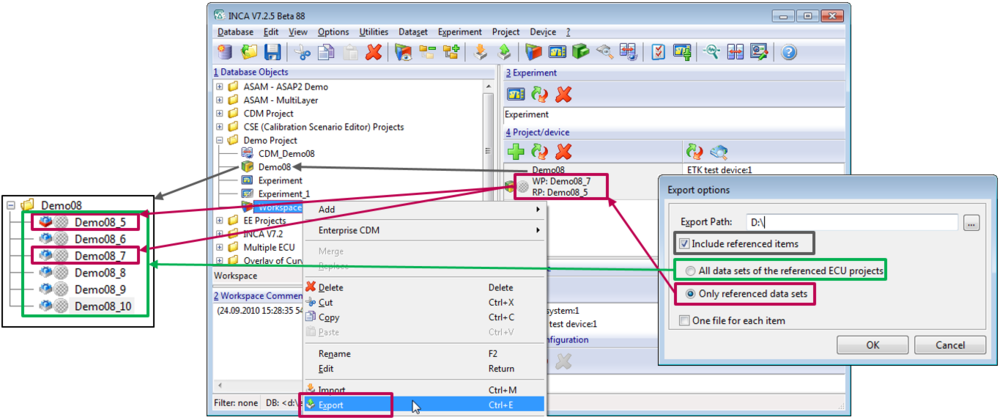
Il est possible de décider lors de l’export d’un espace de travail INCA si tous les jeux de données du projet de calculateur référencé ou seulement les jeux de données utilisés dans l’espace de travail doivent être exportés.
Interface MATLAB®/Simulink® : prise en charge de nouvelles versions et améliorations fonctionnelles
Les add-on INCA-SIP et INCA-MIP prennent désormais en charge MATLAB® 2017a. De plus, INCA-MIP est à présent également compatible avec MATLAB® 2016a et 2016b.
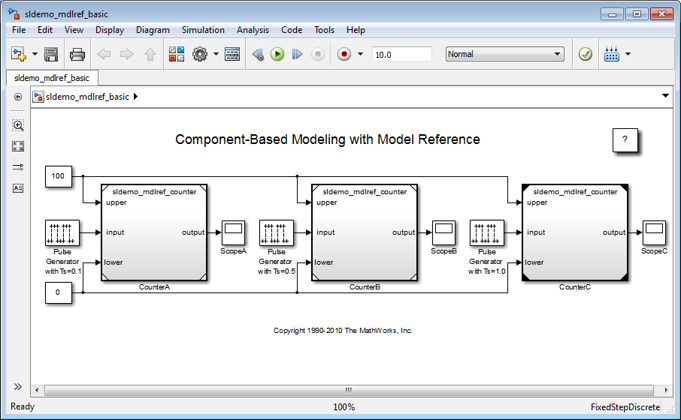
INCA-SIP prend désormais en charge la caractéristique Simulink® suivante : grâce à l’utilisation de blocs modèles, les modèles peuvent être inclus les uns dans les autres. Chaque instance d’un bloc modèle constitue une référence à un autre modèle (modèle référencé). Lors de la simulation et de la génération du code, le modèle référencé remplace le bloc modèle qui le référence. Le modèle contenant un modèle référencé est son modèle parent. Plusieurs modèles parents et référencés constituent une hiérarchie de référence des modèles.
Ajout d’INCA-TOUCH au Service Pack Installer

L’add-on INCA-TOUCH fait désormais partie du Service Pack Installer. La compatibilité entre les versions installées de l’add-on et INCA est ainsi garantie.