機能一覧
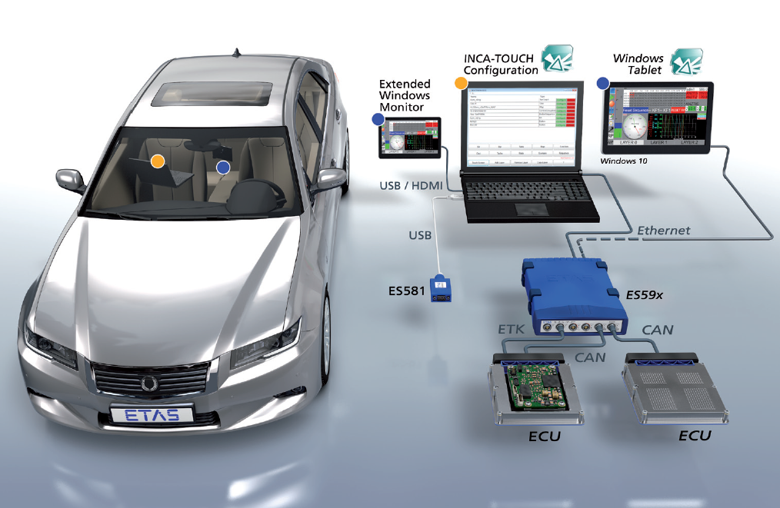
- ETKダイナミックエミュレーションモードで、異なるワーキングページとリファレンスページでの適合が可能に
- データベース: 参照されるデータセットのみをエクスポート
- MATLAB®/Simulink® インターフェース: 新バージョンへの対応と機能改善
- Service Pack Installer(サービスパックインストーラ)にINCA-TOUCHを追加
ETKダイナミックエミュレーションモードで、異なるワーキングページとリファレンスページでの適合が可能に
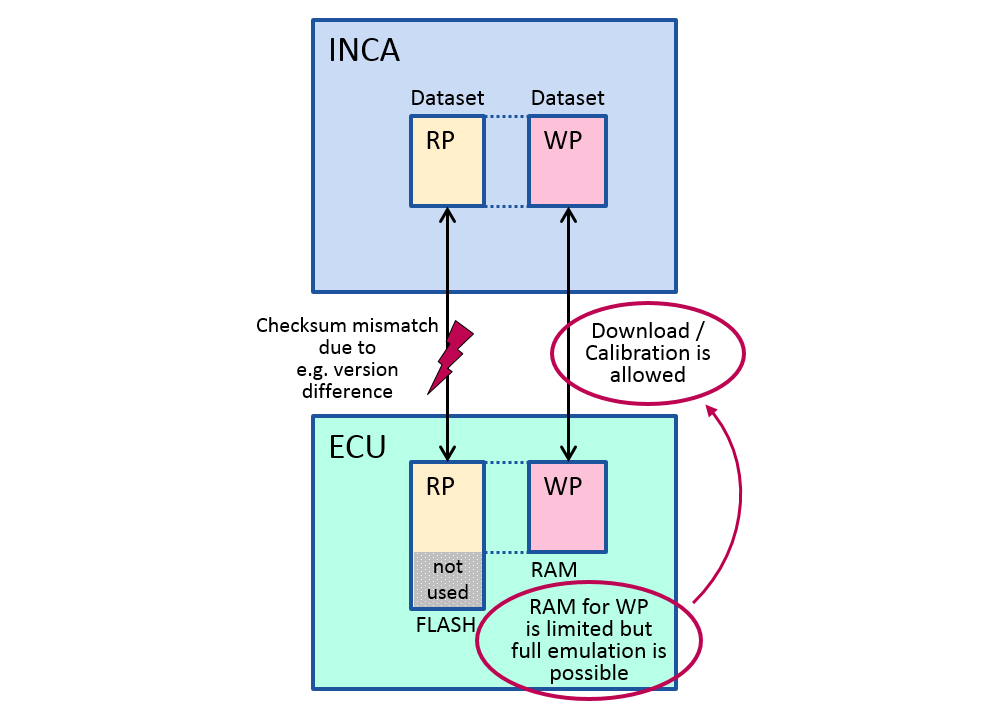
今まで、ETKダイナミックエミュレーションモードで適合を行うためには、ECUとINCAのリファレンスページ(RP)のデータが同じでなければなりませんでした。SP5では、たとえこれらのリファレンスページのデータが異なっていても、実験に必要なすべてのデータを適合するための十分大きなサイズのエミュレーションRAM領域を確保できる場合、INCAでワーキングページ(WP)を使用した適合を行うことができます。
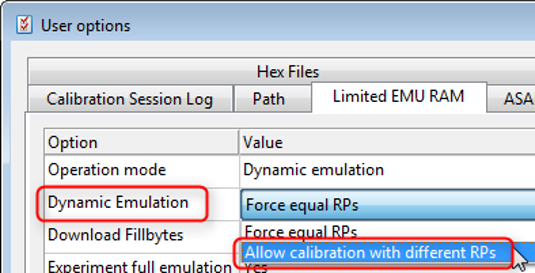
記録するときにRPまたはWP、あるいはその両方が異なる場合、INCAはMDFファイルにコメントを書き込みます。ユーザーはこのコメントを見て、記録されている適合値がECUと同じではないことがわかります。INCAには、この機能を有効にする"Dynamic Emulation" = "Allow calibration with different RPs"という設定があります。
データベース: 参照されるデータセットのみをエクスポート
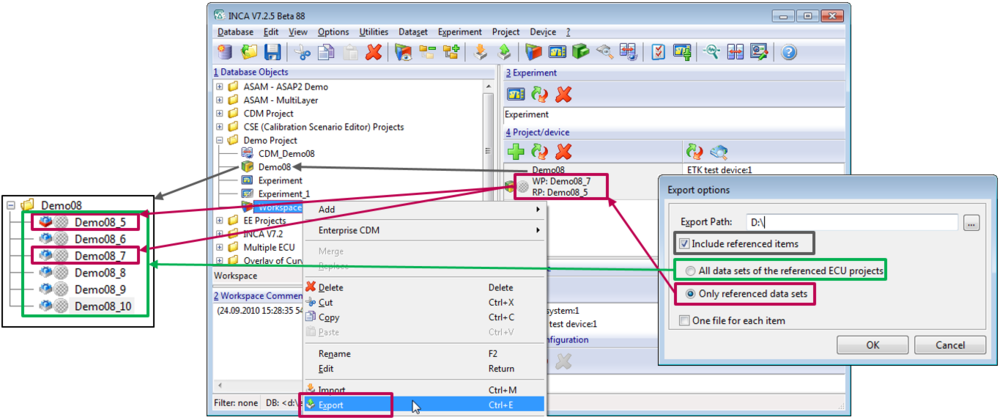
INCAワークスペースをエクスポートするとき、参照されるECUプロジェクト内のすべてのデータセットをエクスポートするか、それともそのワークスペースで使用されるデータセットのみをエクスポートするかを選択することができます。
MATLAB®/Simulink®インターフェース: 新バージョンへの対応と機能改善
INCA用のINCA-SIPアドオンとINCA-MIPアドオンがMATLAB® 2017aに対応するようになりました。さらに、INCA-MIPはMATLAB®の2016aと2016bにも対応しています。
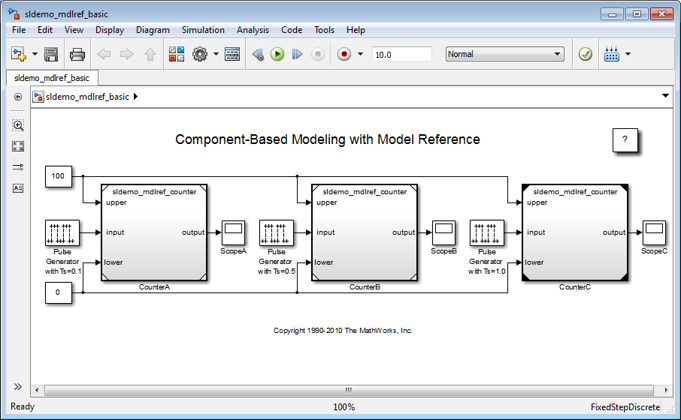
INCA-SIPは、次のようなSimulink®の機能にも対応しています。モデルブロックを使用することで、あるモデルを別のモデルに含めることができます。その場合、あるモデルブロックの各インスタンスが、別のモデル、つまり被参照モデルの参照になります。シミュレーションやコード生成を行うときには、被参照モデルを参照するモデルブロックの代わりに被参照モデルそのものが使用されます。被参照モデルを内包しているモデルは、被参照モデルの親モデルになります。親モデルと被参照モデルの集まりがモデル参照階層を構成します。
Service Pack Installer(サービスパックインストーラ)にINCA-TOUCHを追加

INCA-TOUCHアドオンがINCAのService Pack Installerに組み込まれ、これにより、インストールされるアドオンのバージョンとINCAのバージョンの互換性を確保できるようになりました。