Functions at a glance
- Calibration in ETK dynamic emulation mode with different working and reference pages
- Database: export of referenced data sets only
- MATLAB®/Simulink® interface: support of new versions and functional improvements
- INCA-TOUCH added to Service Pack Installer
Calibration in ETK dynamic emulation mode with different working and reference pages
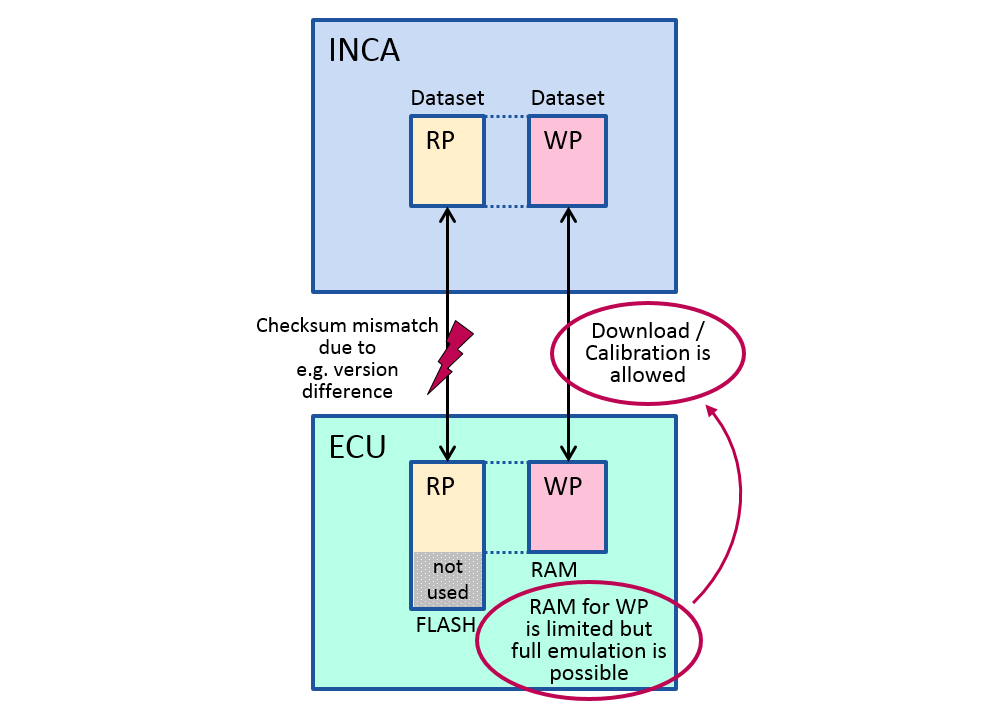
Up to now, calibration in ETK dynamic emulation mode required reference pages on the ECU and in INCA with the same data. With SP5, INCA allows calibration on the working page (WP) even if the reference pages (RP) are different as long as all calibration data required by the experiment fit into the emulation RAM.
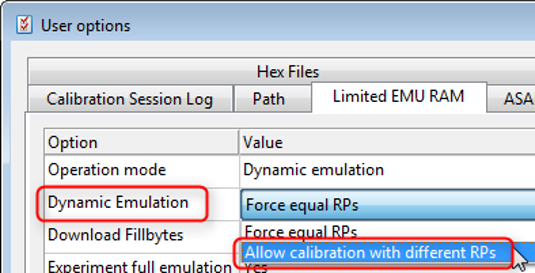
When recording, INCA writes a comment in the MDF file if RPs or WPs or both are different. This gives the user a hint that recorded calibration values may not be identical to those in the ECU. To enable the functionality, INCA supports the setting "Dynamic Emulation" = "Allow calibration with different RPs".
Database: export of referenced data sets only
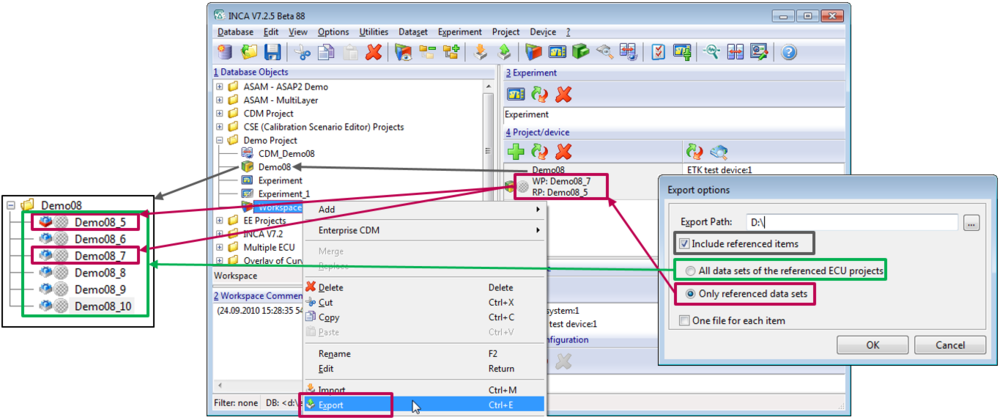
When exporting an INCA workspace it is possible to decide whether all data sets of the referenced ECU project are exported or only those used in the workspace.
MATLAB®/Simulink® interface: support of new versions and functional improvements
The INCA add-ons INCA-SIP and INCA-MIP now also support MATLAB® 2017a. In addition to that, INCA-MIP now complies with MATLAB® 2016a and 2016b, too.
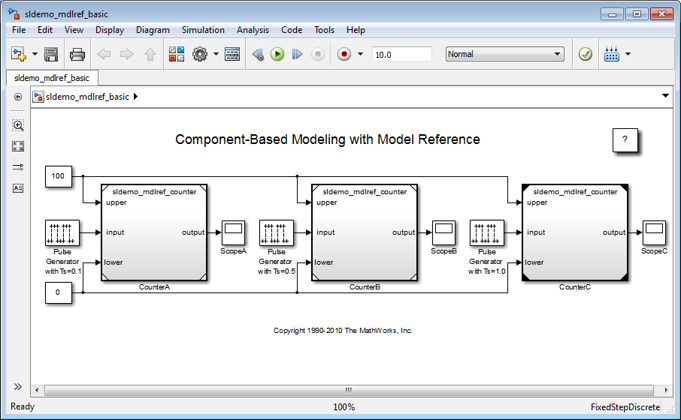
To INCA-SIP, the support of the following Simulink® feature has been added: By using model blocks, models can be included into one another. Each instance of a model block represents a reference to another model, called a referenced model. For simulation and code generation, the referenced model effectively replaces the model block that references it. The model that contains a referenced model is its parent model. A collection of parent and referenced models constitute a model reference hierarchy.
INCA-TOUCH added to Service Pack Installer

The INCA-TOUCH add-on to INCA is now part of the Service Pack Installer. Thus, compatibility between installed versions of the add-on and INCA is ensured.