The Right Interface
When it comes to the acquisition of a large number of signals, the ETK or XETK ECU interfaces are optimal. To satisfy more moderate performance requirements, serial calibration protocols like the ASAM-specified CAN Calibration Protocol (CCP) or its successor, the Universal Measurement and Calibration Protocol (XCP) - which is specified for CAN, CAN FD, FlexRay and Ethernet physical layers - are often implemented on the development ECUs. The calibration of production ECUs is done on the CAN diagnostic interface via a diagnostic protocol such as KWP2000. Signal monitoring on the vehicle buses LIN, CAN, CAN FD, and FlexRay complements both testing and calibration applications.
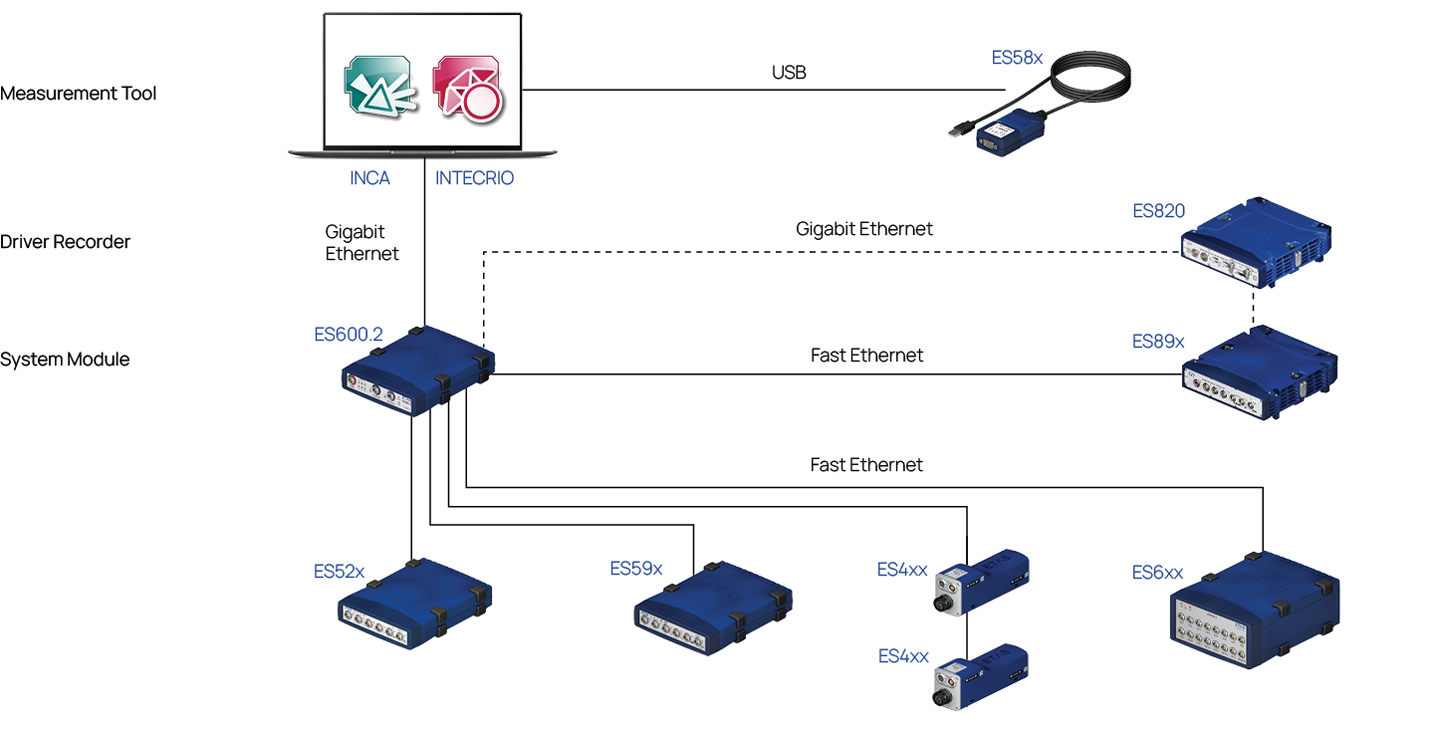
INCA Support
All compact ECU and bus interface modules of the product family ES500 are supported by the software INCA. INCA can record ECU and vehicle bus signals and data from sensors or analog sources, which are provided by ES400 or ES600 measurement modules.
ES500 ECU & Bus Interface Modules
As an alternative to the ES500 modules the ES900 Prototyping and Interface Modules can also be used with INCA for the acquisition of measurements and ECU application. The compact ES910 Prototyping module is distinguished from the ES59x modules by its high computation power. ES910 lets you easily validate ECU function prototypes whether designed in MATLAB®/Simulink®, ASCET, or coded in C under real-life conditions in the vehicle.
| Product Series | ECU and Bus Interfaces | PC Interface |
|---|---|---|
| ES523 – CAN FD Interface Module |
CAN FD, CAN |
Ethernet |
|
CAN, CAN FD, FlexRay |
USB |
|
|
ETK, Ethernet/XETK, FlexRay, CAN, LIN |
Ethernet |
The ES900 Prototyping and Interface Modules are also supported by INCA.
The compact ES910 Prototyping module is distinguished from the ES59x modules by its high computation power. ES910 lets you easily validate ECU function prototypes whether designed in MATLAB®/Simulink®, ASCET, or coded in C under real-life conditions in the vehicle.


