The ETAS ES886 ECU and Bus Interface Module is part of the ES800 product family, which provides hardware modules for sophisticated measurement, calibration, and prototyping applications. Using the ES886 ECU and Bus Interface Module, Automotive Ethernet (AE) ECUs and vehicle buses can be connected to the ES800 measurement, calibration, and prototyping system. The ES886 module has been designed for monitoring data communication involving state-of-the-art protocols and signals.
Together with the BroadR-Reach® BR_XETK ECU interface and the INCA software tool, ETAS offers a solution for the validation and calibration of interconnected electronic systems in the vehicle and on the test bench that aims to optimize overall integration efforts.
Important functions
In addition to the Ethernet, CAN, CAN FD and LIN vehicle buses, the ES886 module supports the BR_XETK and XETK ECU interfaces from ETAS. Up to three BR_XETKs can be connected to one ES886 module simultaneously. Measurement modules from the ES400 or ES600 product families as well as ES523, ES592, ES593-D and ES595 ECU Interface Modules and ES9xx Prototyping and Interface Modules can be connected to the ES886 module via Fast Ethernet.
Ethernet monitoring
The ES886 module can be used for Ethernet monitoring in order to keep track of what is happening on the network at all times. ES886 allows Ethernet monitoring to take place parallel to up to four connections and with up to two BR_XETKs. Parallel to Ethernet Monitoring it also enables data sending.
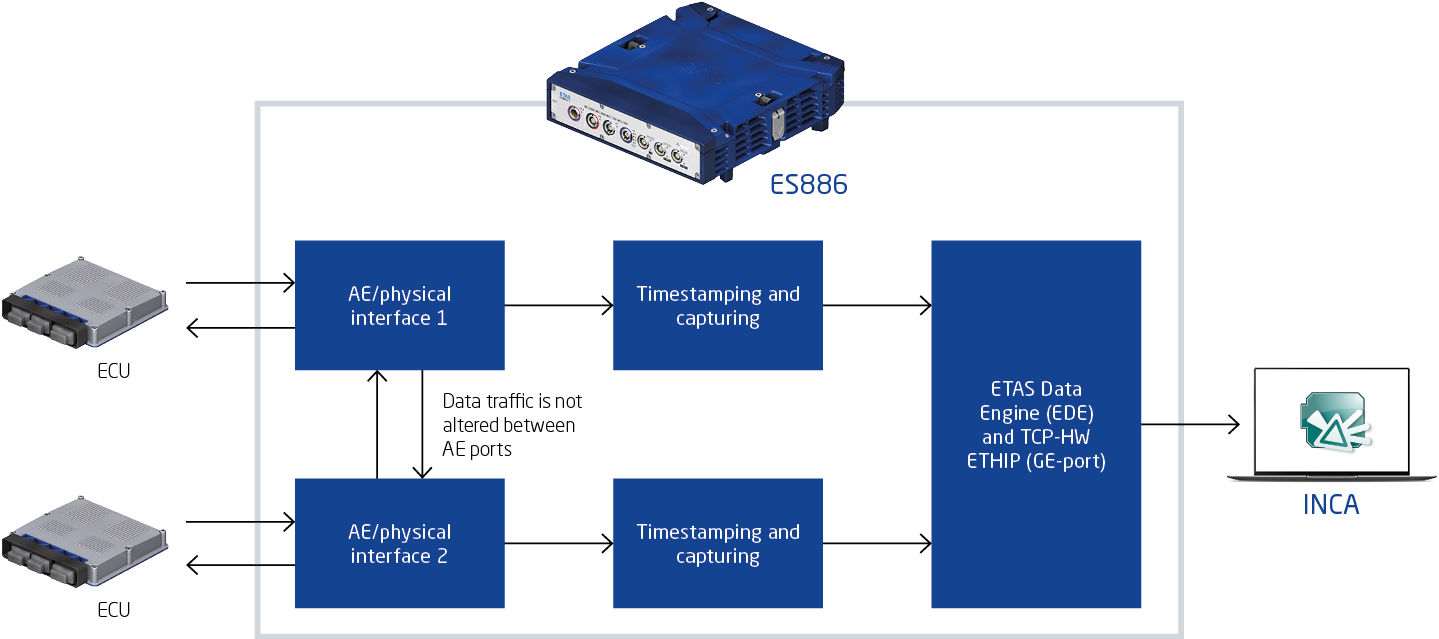
Ethernet monitoring via AUTOSAR PDU or SOME/IP takes place via a direct 100Base-T1 connection. Here, data packets are duplicated in a passive and transparent way for the network with the help of an internal TAP (test access port) and CAP (Capturing) functionality.
In the case of Tapping with ES886, monitoring takes place via the AE ports 1 and 2, and also via 3 and 4. This also simultaneously via the four AE ports 1 and 2, and via 3 and 4.
Capturing is possible with each of the four AE ports and with the GE and FE port. This can be set up in parallel with up to four of the six ports. For the purpose of monitoring, a gateway can also be connected to AE ports 3 and 4 directly.
Synchronization with all ETAS interfaces has an accuracy of up to 1 microsecond thanks to timestamping. A PC is used as the display device.
Applications
- Calibration and prototyping of ECUs via Automotive Ethernet
- Avoids overloading the Ethernet bus from the measurement network to the host due to VLAN filtering on the ES886
- Measurements in the vehicle and on the test bench with high data rates
- Ethernet monitoring with AUTOSAR PDU is available with INCA V7.2 SP13. Ethernet monitoring with SOME-IP is available with INCA 7.2 SP15. The latest firmware update is required.
Benefits
- Ethernet monitoring with unmodified data traffic between the interfaces during Capturing.
- VLAN filtering for Ethernet monitoring with ES886 to reduce the traffic volume to the HOST
- Open and standards-compliant: communication of applications with BR_XETK ECUs via XCP-on-Ethernet protocol is possible
- Simple integration in heterogeneous measurement setups with automation solutions with a central clock; deployment also as a synchronization master in accordance with the IEEE1588 standard (PTP)
- Time-synchronous acquisition of signals from BR_XETK and XETK ECUs, vehicle buses, and measurement modules with an accuracy greater than 1 microsecond using ETAS hardware
- Full integration of the ES88x-/ES89x modules into third-party tools with C libraries provided by ETAS
- Seamless integration in INCA
- Four Automotive Ethernet BroadR-Reach® interfaces, of which three can be used for BR_XETK; one Gigabit Ethernet port and one XETK/Fast Ethernet port
- Five independent CAN/CAN FD interfaces
- One independent LIN interface
- Configurable: wake-up on CAN and wake-up on CAN FD at the start of transmission
- Simple plug-in mechanism for connecting additional modules from the ES800 family
- Robust metal housing (IP44)