次世代E/Eアーキテクチャ
新たな機会を提供するビークルコンピュータの新E/Eアーキテクチャ

カーエレクトロニクスは現在、コネクティビティや自動運転といった大きな流れの中で重要な変化に直面しています。これからは、分散しているいくつものドメインをマイクロプロセッサベースの「ビークルコンピュータ(VC)」で一つに統合する、まったく新しいE/Eアーキテクチャが求められることになります。 AUTOSAR Adaptive規格に基づくソフトウェアと、VCを複数の仮想マシンに分割する機能が原動力となり、車載ソフトウェアの開発は新たな局面へと向かうでしょう。
コネクティビティの大潮流(メガトレンド)に乗って、自動車にも「つながる家電」と同様の通信技術と使い勝手が求められつつあります。 最新の車両は周辺設備にも接続されるようになりました。この変化はこれまでにない可能性の世界を拓きます。自動車の機能が大幅に増加するとともに、スマートフォンと同じようなサービスやユーザーエクスペリエンスをも提供できるようになるでしょう。 この進歩により、種々のIT(ソフトウェア)技術が十分に試行され、車両に搭載されるようになりました。 二つ目の大潮流は運転支援、そして日に日に自動化の度合が高まる自動運転。これもまた、交通環境認識をはじめとする機能の劇的な増加を意味しています。
これら二つの先進技術をともに実用化することは既存のECUネットワーク上では困難であり、今よりはるかに高い計算能力および構造化されたアーキテクチャが要求されます。予想される高機能化はソリューションを格段に複雑なものにし、120もの分散ECUが必要になると考えられています。
このスケールを理解するために一つ比較をしてみましょう。今日の車載ソフトウェアはすでに1億行を超えるコードで構成され、これはスペースシャトルの100倍、民間航空機の4倍以上の数となります。Bosch社のエキスパートの予測によると、リアルタイムシステムやインタラクティブなアプリケーションを含めたハードおよびソフトの全機能をカバーするには、未来の車載ソフトウェアの複雑さは今の1万倍の規模になります。自動車はいわば「車輪付きのスマートデバイス」とも呼ぶべき、ソフトウェアが主役のシステムになります。そうしたソフトウェア部品をすべて確実に組み入れ、かつ自動車安全度水準(Automotive Safety Integrity Level:ASIL)における最高レベルDの安全要件とサイバーセキュリティ要件の両方を満たすことが、目の前の課題となるのです。
限界を超える複雑さ - 新手法の必要性
自動車業界はこのような課題に対し、IT・モバイル通信機器を駆使する取り組みを進めています。優れた計算能力と、より大きい(外部)ストレージ容量を備えたマイクロプロセッサ(μP)ベースのビークルコンピュータ(VC)に現行型のマイクロコントローラベースのECUを補完させれば、自動車メーカーは従来のECUの機能を集中型のVCへと移行できます(次頁の図1)。
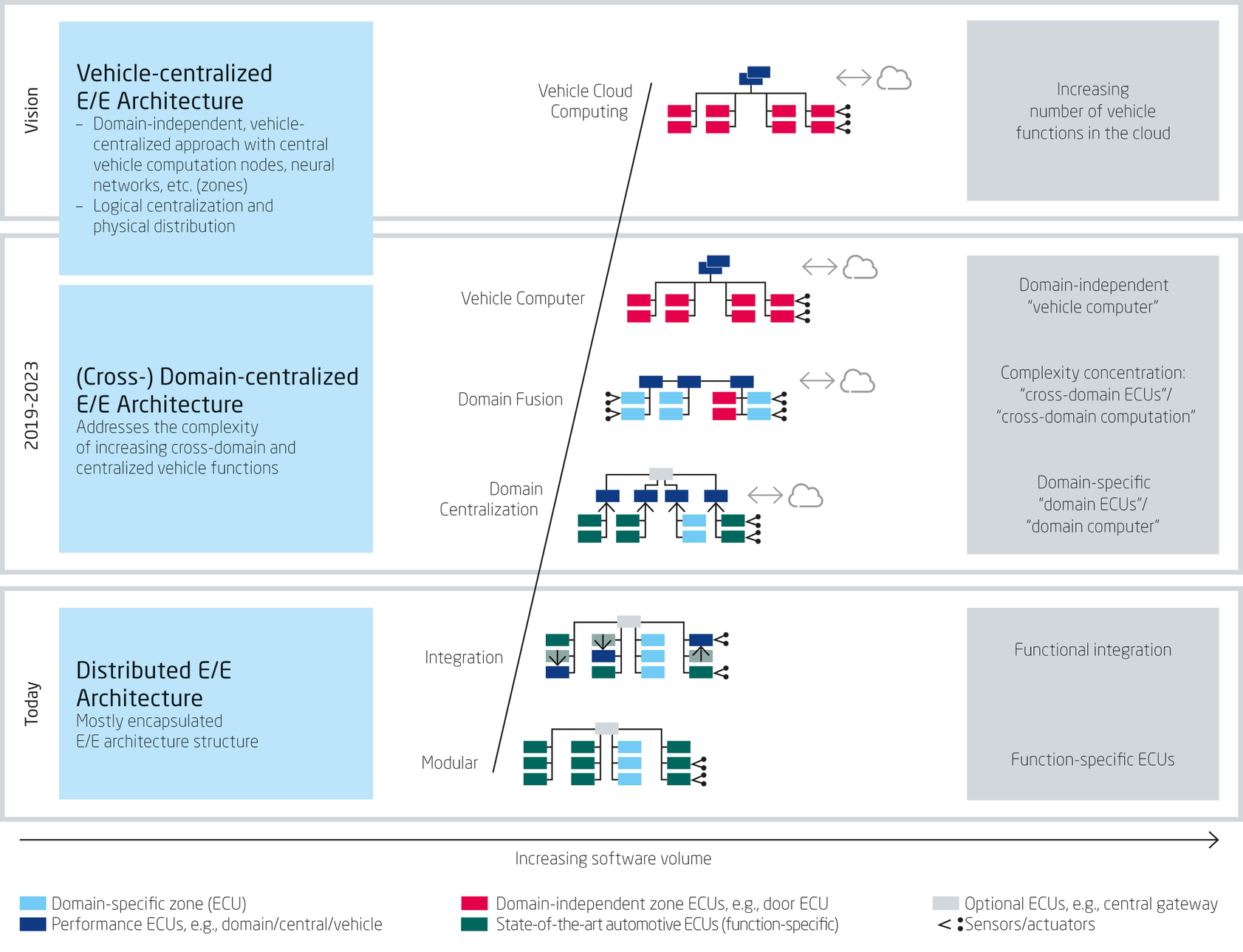
これにより、分散していたドメインは一つに統合されます。3~4個のドメインを単一のビークルコンピュータへ統合する新アーキテクチャ。その発想と実現を助けるもう一つの技術は、ハイパーバイザを用いたVCの分割です。 統合された一連の仮想ECUは、それぞれがカプセル化したドメイン上で独立して稼動することができます。
この柔軟性にクラウド接続を組み合わせれば、走行中でも新たな機能やアップデートを車両へ送信できます。この無線通信(over-the-air:OTA)技術こそが新しいビジネスモデルへの鍵となり、新たな販売機会の創出につながることが期待されています。
走行時のあらゆる車両データへのアクセスは、さらなる魅力の一つです。自動車メーカーは車を購入しようとするお客様により的確なアドバイスをし、実際の運転プロファイルに基づいたテーラーメードの運転設定や保険料率などを提案できるようになるでしょう。 また、データをもとに車両コンポーネントの耐用年数を判定し、時期尚早の交換を避けられるかもしれません。ひとことで言えば、とてつもなく大きな可能性が開けるのです。
きわめて複雑でドメイン横断的な自動運転機能の面でも、分散型のECUインフラストラクチャーがいずれはぶつかる限界を、集中型のアプローチと標準化された制御レイヤによって克服できるはずです。環境センサ(レーダー、ビデオ、LiDAR)が取得する大量のデータのマージ、比較、検証を可能にするには、今よりはるかに強力なビークルコンピュータが必要です。
建設的なドメイン統合
長い時間をかけて進化してきたドメインの分離は物理的に冗長なものとなっていますが、VCのE/Eアーキテクチャのもとでは、これが不要になります。意思決定は中央にて行われるため、これまでのように無数のECU間で分散して決定を行って調整する手間はなくなります。したがって、手に余るほどの複雑さは解消され、制御装置と駆動タイプとの依存関係は小さくなります。たとえばハイブリッド駆動と電気駆動における効率的な回生戦略、自動運転車における意思決定など、さまざまな決定要素の機能的特性に幅広く綿密に対応することができる制御プラットフォームが生み出されるでしょう。
未来の開発作業の範囲と利点を、例を挙げてご説明しましょう。開発者は自動運転を実装するために三次元の運動軌道を計算します。車両が道路上で取りうるさまざまな軌道に照らし、実際の経路が決定されます。これは非常に複雑なプロセスで、安全性に関連したあらゆる情報に加えて、運転の快適さやエネルギー消費などのパラメータまでが処理されます。 ドメインの集約化は特にこのプロセスで、まずブレーキやステアリング操作を含む運転機能とシャーシ機能について効果を現わすと考えられます。ここでの目標は、それらの機能を制御レベルで一つのソフトウェアパッケージに統合し、そのパッケージをVC上で車両モーションコントローラとして実行することです。このソフトウェアベースのコントローラは軌道を受け取り、分析し、最適化して、駆動タイプに依存することなく、結果を運転機能やシャーシ機能に対するコマンドに変換します。 コマンドの送り先が内燃機関、ハイブリッド駆動、電気駆動、燃料電池駆動のいずれであるかは問題ではありません。
ソフトウェア開発とハードウェアの分離
BoschとETASはすでにVC向けのソリューションをご提供しています(図2)。At their core is the その中核をなすのは、マイクロプロセッサベースVC向けのRTA-VRTE(Vehicle Runtime Environment)プラットフォームソフトウェアフレームワークと、AUTOSAR Adaptive規格に基づくソフトウェアです。
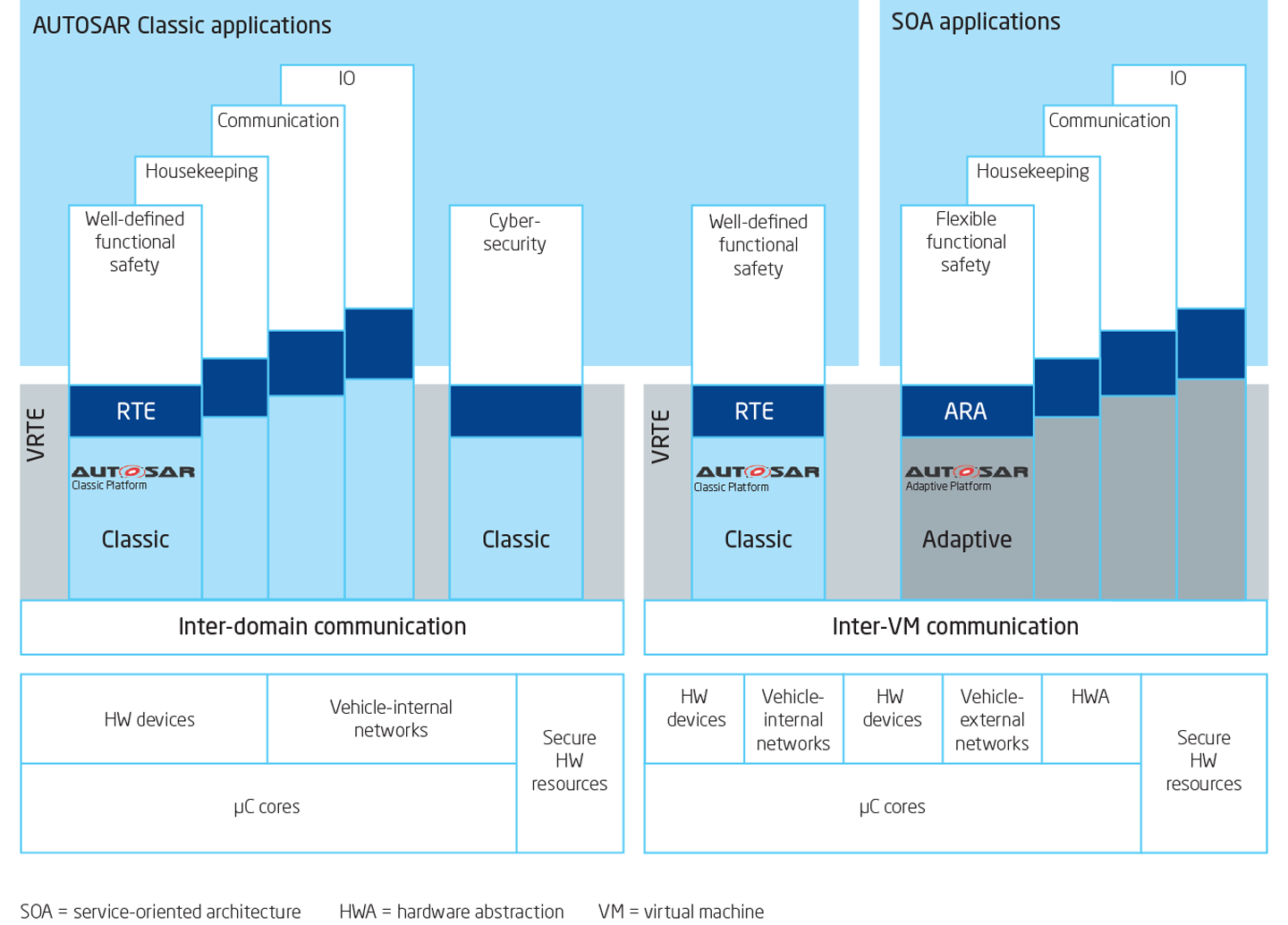
分割された仮想マシン(VM)はカプセル化されていて互いに干渉しないので、ドメインの集約化や便利な新機能/セキュリティアップデートの導入に際して、すべてのアプリケーションをアップデートする必要は(システム構築時にも将来の開発時にも)ありません。機能アップグレードもソフトウェアの更新もPCやスマートフォンと同じように常時実行できるだけでなく、ソフトウェア開発はハードウェアから完全に切り離して行うことができます。
したがって、RTA-VRTEはVC、PCを問わずμPベースのすべてのハードウェア上で実行でき、エンドツーエンドのソフトウェア開発の仮想化を可能にします。つまり、ビークルコンピュータのカプセル化されたパーティション(言い換えればバーチャルECU)上ですでに稼動している車載ソフトウェアは、どのPCからもバーチャルECU上で開発できるのです。それを可能にするのは適切なハードウェア抽象化層の存在です。
これこそが、まさしくETASのEarly Access Programの基礎をなす考え方です。Early Access Programを開始すれば、未来のメソッドやアーキテクチャをいち早く体験していただくことができます 後のページで詳細をお読みになれますが、その前にまず、AUTOSAR Adaptive規格についてご説明します
執筆者
Dr. Andreas Lock、Bosch Engineering GmbH 電気・電子部門
システムエンジニアリング担当副社長
Dr. Nigel Tracey、ETAS Ltd.(イギリス、ヨーク)
RTAソリューション担当副社長兼ゼネラルマネージャー
Dr. Detlef Zerfowski、ETAS GmbH
ビークルコンピュータ・セキュリティ担当副社長
