Aufbruch in neue Welten
Neue E/E-Architekturen mit Vehicle Computern bringen neue Chancen!

Die Automobilelektronik steht vor tiefgreifenden Veränderungen. Treiber sind die Megatrends Vernetzung und automatisiertes Fahren. Sie verlangen nach ganz neuen E/E-Architekturen, in denen Vehicle Computer (VCs) auf Mikroprozessorbasis die Fusion bisher verteilter Domänen ermöglichen. Software nach dem AUTOSAR-Adaptive-Standard und die Möglichkeit zur Partitionierung der VCs in virtuelle Maschinen lösen eine Dynamik aus, die uns in neue Welten der Automotive-Software-Entwicklung führen wird.
Kommunikationstechnik und Hardware aus der Consumer-Elektronik halten Einzug ins Automobil. Treiber ist der Megatrend Connectivity, der unter anderem zur Vernetzung moderner Fahrzeuge mit ihrer Umgebung führt. Das eröffnet ein ganz neues Feld an Möglichkeiten und zieht einen enormen Zuwachs an Funktionen nach sich: Services und User Experience, die Endkunden von ihren Smartphones gewohnt sind, werden im Fahrzeug verfügbar sein. Mit dieser Entwicklung gelangt eine Reihe bewährter (SW-)Technologien aus der IT in das Fahrzeug.
Zudem existiert ein zweiter Megatrend: das assistierte und zunehmend automatisierte Fahren. Was wiederum einen drastischen Zuwachs an Funktionen bedeutet, wie zum Beispiel der Umwelterkennung.
Beide Themen zusammen sind mit heute verfügbaren Steuergerätenetzwerken kaum realisierbar. Es bedarf deutlich mehr Rechenleistung und klarer strukturierten Architekturen als bisher, denn der zu erwartende Funktionszuwachs würde in heutigen Lösungen mit oftmals bis zu 120 dezentralen Steuergeräten (ECUs) einen dramatischen Anstieg an Komplexität verursachen.
Ein Vergleich hilft, die Dimension der Aufgabe zu verstehen: Automotive Software hat schon heute einen Umfang von über 100 Millionen Lines of Code, rund 100 Mal mehr als im Space Shuttle und über viermal so viel wie in einem Verkehrsflugzeug. Experten bei Bosch gehen davon aus, dass der Umfang künftiger Automotive Software um den Faktor 10.000 ansteigt. Dabei reicht die Funktionalität vom harten Echtzeit-System bis zur interaktiven App. Das Automobil wird zum softwaredominierten System, zu einem „Smart Device auf Rädern“. Es gilt nun, all diese Softwareteile zuverlässig zu integrieren und zugleich höchste Sicherheitsanforderungen des Automotive Safety Integrity Level (ASIL) D, kombiniert mit Cybersecurity-Anforderungen, zu erfüllen.
Grenzwertige Komplexität – neue Ansätze sind gefragt
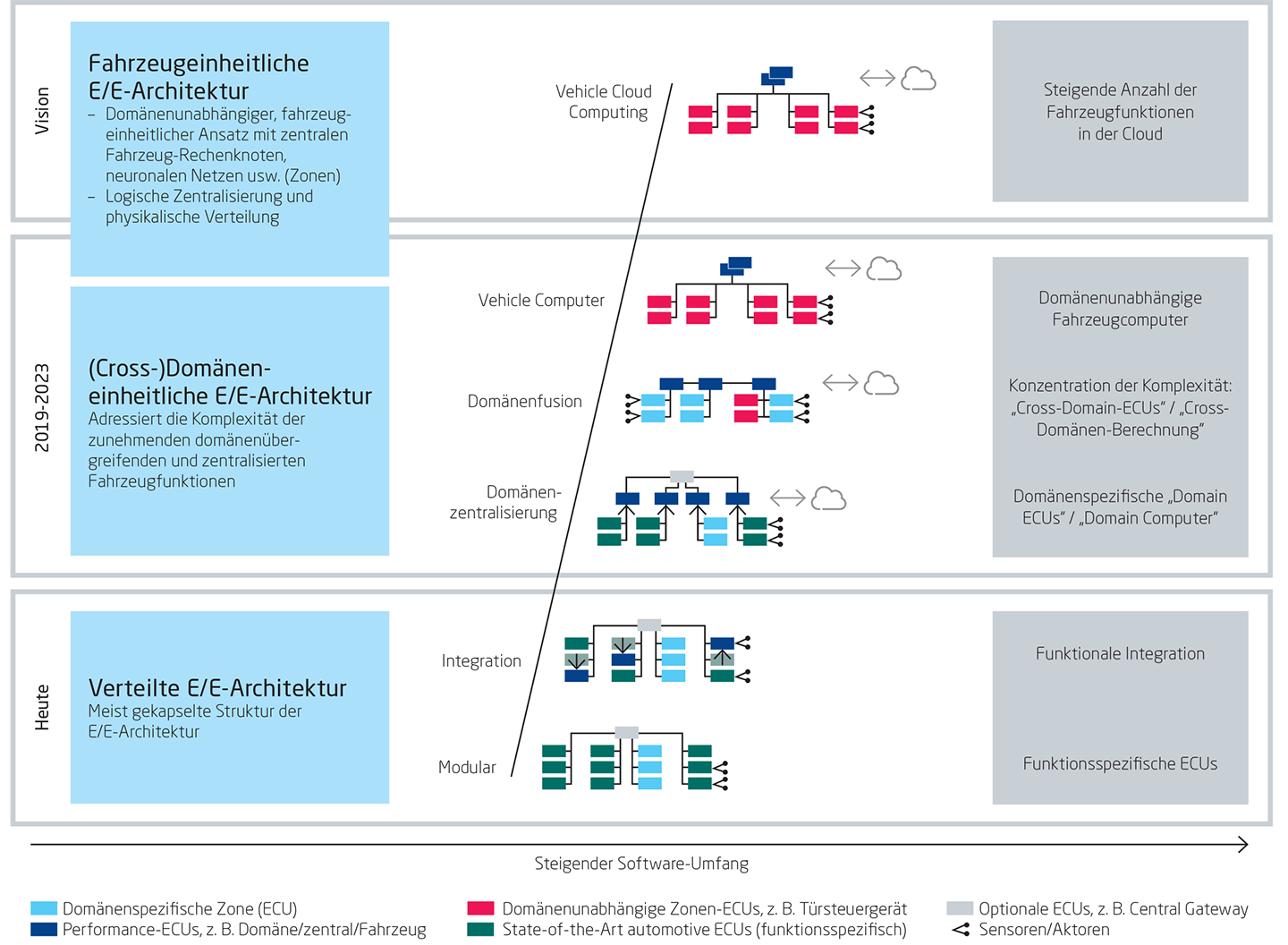
Es besteht Handlungsbedarf, den die Automobilindustrie mit Hardware aus dem IT- und Mobilfunkbereich angeht: Mikroprozessor(µP)-basierte Vehicle Computer (VCs) mit hohen Rechenleistungen und deutlich mehr (externer) Speicherkapazität ergänzen die bisherigen Steuergeräte auf Mikrocontrollerbasis. Das ermöglicht es den Herstellern, Funktionen aus herkömmlichen ECUs auf zentralisierte VCs zu übertragen (Bild 1). So können bisher verteilte Domänen verschmelzen. Fusionen von drei bis vier Domänen auf einem VC werden denk- und machbar. Dies auch deshalb, weil VCs sich per Hypervisor partitionieren lassen. Auf den gekapselten Bereichen kann eine ganze Reihe von Virtual ECUs unabhängig voneinander integriert und betrieben werden.
Diese Flexibilität in Verbindung mit der Vernetzung in die Cloud eröffnet die Möglichkeit, neue Funktionen oder Updates auch im Feld ins Fahrzeug zu übertragen. Solche Over-the-Air(OTA)Technologien gelten als Schlüssel zu neuen Geschäftsmodellen, mit denen sich neue Umsatzchancen eröffnen.
Darüber hinaus ist der umfassende Zugang zu den Daten der Fahrzeuge im Feld attraktiv. Denn auf ihrer Basis können Hersteller ihre Kunden gezielter beim Autokauf beraten, ihnen maßgeschneiderte Antriebskonfigurationen anbieten oder Versicherungstarife, die sich an realen Fahrprofilen orientieren. Zudem wird es möglich, aus den Daten Rückschlüsse auf die Lebensdauer von Fahrzeugkomponenten zu ziehen, um diese erst erneuern zu müssen, wenn es tatsächlich notwendig ist. Kurz: Es eröffnet sich ein riesiges Feld an Möglichkeiten.
Bei hochkomplexen, domänenübergreifenden Funktionen des automatisierten Fahrens stoßen dezentrale ECU-Infrastrukturen ebenfalls an Grenzen, die sich mit zentralisierten Ansätzen und einer einheitlichen Steuerungsebene überwinden lassen. Erst deutlich leistungsfähigere VCs machen es möglich, riesige Datenmengen der Radar-, Video- oder Lidar-Umfeldsensorik zu fusionieren, abzugleichen und im Sinne maximaler Sicherheit zu plausibilisieren.
Domänen sinnvoll fusionieren
E/E-Architekturen mit VCs erlauben es, die historisch gewachsene, aber physikalisch überflüssige Trennung der Domänen aufzuheben. Die Entscheidungen werden dann zentral getroffen, anstelle der verteilten Entscheidungsfindung und Koordination zwischen vielen Steuergeräten. Das hält die Komplexität beherrschbar und reduziert die Abhängigkeit zwischen Steuerung und Antriebsart. Auf diese Weise entstehen Steuerungsplattformen, mit denen sich funktionale Eigenheiten verschiedenster Einflussfaktoren im Detail adressieren lassen – zum Beispiel zur effizienten Rekuperationsstrategie für Hybrid- und Elektroantriebe oder für die Entscheidungsfindung automatisierter Fahrzeuge.
Um den Umfang und Nutzen der kommenden Aufgaben zu verdeutlichen, ein Beispiel: Entwickler rechnen bei der Umsetzung des automatisierten Fahrens in dreidimensionalen Bewegungstrajektorien. Die tatsächliche Route wird im Abgleich verschiedener Bahnkurven, sogenannter Trajektorien, bestimmt, die das Fahrzeug im Verkehrsraum nehmen kann. Es sind hochkomplexe Verfahren, in die neben allen sicherheitsrelevanten Informationen selbst Parameter wie Fahrkomfort oder Energieverbrauch einfließen. Hier birgt Domänenfusion besonderes Potenzial. Zunächst für die Funktionen von Powertrain und Chassis inklusive Bremse und Lenkung. Ziel ist es dabei, sie funktional als ein Softwarepaket auf der Steuerungsebene zu integrieren – und dieses als „Vehicle-Motion-Controller“ auf dem VC auszuführen.
Dieser softwarebasierte Controller nimmt Trajektorien entgegen, analysiert und optimiert sie und übersetzt das Resultat in Befehle an den wie auch immer gearteten Antrieb und an die Chassis-Funktionen. Ob diese Befehle an einen Verbrennungs-, Hybrid-, Elektro- oder Brennstoffzellenantrieb gehen, spielt dabei keine Rolle.
Trennung von Software-Entwicklung und Hardware
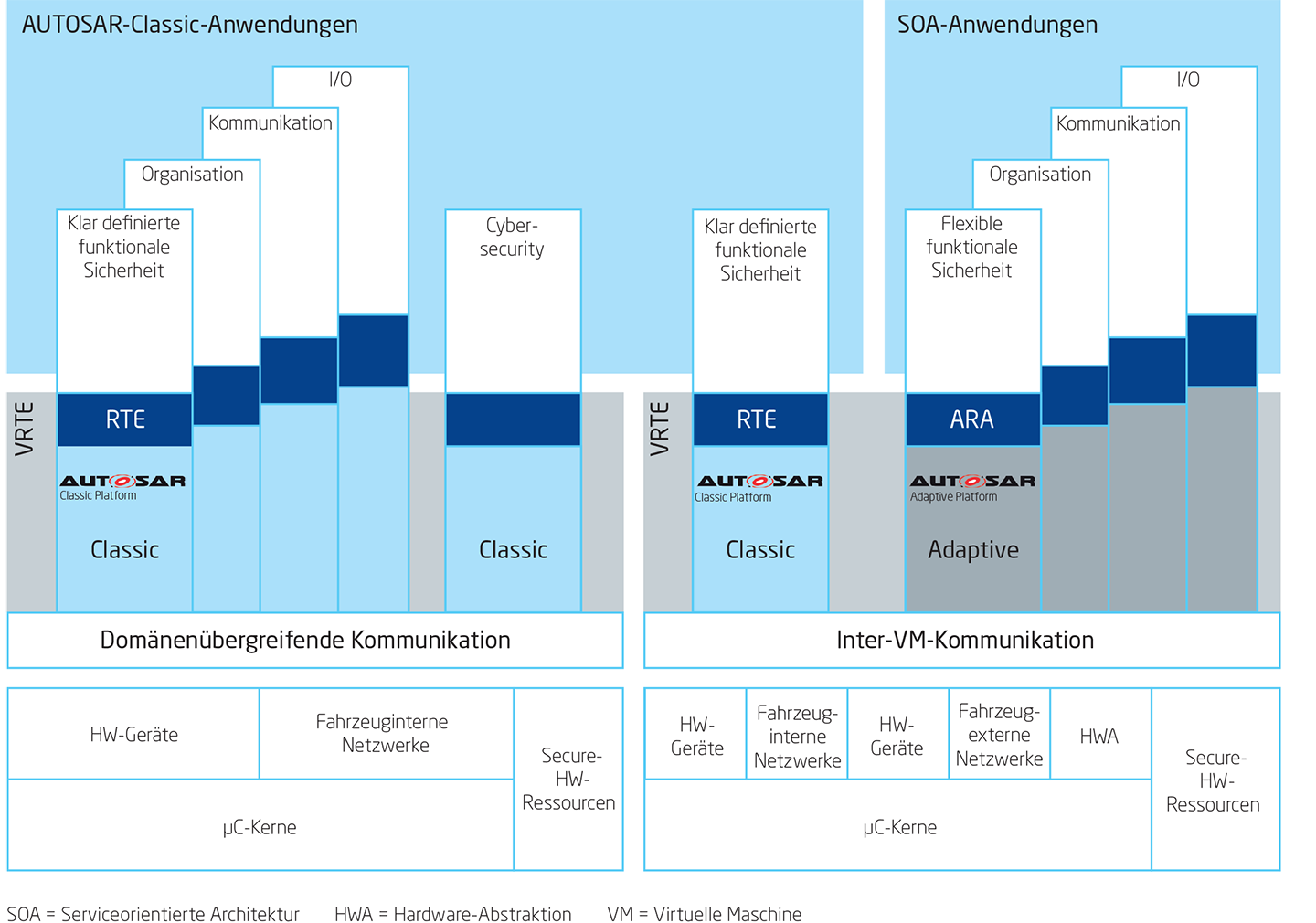
Bosch und ETAS haben bereits Lösungen für leistungsstarke VCs im Angebot (Bild 2). Herzstück ist das Plattformsoftware-Framework RTA-VRTE (Vehicle Runtime Environment) für µP-basierte VCs und Software nach dem AUTOSAR-Adaptive-Standard. Es ermöglicht die Partitionierung der VCs in virtuelle Maschinen ohne gegenseitige Beeinflussung (Freedom from Interference) sowie die Integration heterogener Daten- und Signalübertragungsstrukturen basierend auf POSIX-konformen Betriebssystemen.
Ob Domänenfusion, neue Komfortfunktionen oder Security-Updates – dank der Partitionierung in gekapselte virtuelle Maschinen (VMs) und Freedom from Interference ist es im Zuge der Integration und Weiterentwicklung nicht mehr nötig, die gesamten Applikationen zu erneuern. Wie beim PC oder Smartphone werden laufende Funktionserweiterungen und Software-Updates möglich. Mehr noch: Die Software-Entwicklung kann ganz und gar losgelöst von der Hardware erfolgen.
RTA-VRTE läuft daher auf jeder µP-basierten Hardware, egal ob VC oder PC. Das ebnet einer durchgehenden Virtualisierung der Software-Entwicklung den Weg. Denn Software, die im Fahrzeug ohnehin auf gekapselten Partitionen des Vehicle Computer – also auf virtuellen ECUs – betrieben wird, kann auch auf virtuellen ECUs an jedem PC entwickelt werden. Entsprechende Hardware-Abstraktionsschichten machen es möglich. Genau dieser Ansatz ist der Grundgedanke des Early Access Program von ETAS, mit dem Frühstarter ab sofort in die zukünftigen Methoden und Architekturen eintauchen können. Mehr davon in den folgenden Artikeln, den Anfang macht der AUTOSAR-Adaptive-Plattform-Standard.
Autoren
Dr. Andreas Lock ist Vice President Systems Engineering, Sector Electric & Electronic der Robert Bosch GmbH.
Dr. Nigel Tracey ist Vice President RTA Solutions und General Manager bei ETAS Ltd. in York, Großbritannien.
Dr. Detlef Zerfowski ist Vice President Vehicle Computer und Security bei der ETAS GmbH.
