Funktionen im Überblick
- Unterstützung von ODX V2.2
- Unterstützung von LIN V2.2 und SAE-J2602
- CAN-FD – Unterstützung von CAN Message Sending auf beliebigen CAN-IDs während des Flashens
- Neue ASAP3-Schnittstelle bietet Kunden Informationen über die Tool-Konfiguration
- Verbesserte grafische Visualisierung aktiver Signale in der Experimentierumgebung
- J1939-Monitoring mit 250 und 500 kBaud
- Unterstützung von GNSS-Messgeräten in INCA
Unterstützung von ODX V2.2
Unterstützung von ASAM MCD-2D/ODX V2.2.0 [ISO/DIS 22901-1]
- INCA unterstützt nun ODX-V2.2-Beschreibungsdateien im PDX-, ODX- oder XPRJ-Format
- Unterstützung von ODX COMPARAM gemäß dem Standard ODX V2.0.1/V2.2 für die Hardware-Initialisierung von KWP2000-on-CAN-/K-Line- und UDS-on-CAN-Geräten
Dank der Kompatibilität mit ODX V2.0.1 können weiterhin entsprechende Projekte aus der INCA-Datenbank genutzt bzw. in INCA importiert und mit ODX-LINK/FLASH verwendet werden.
Unterstützung von LIN V2.2 und SAE-J2602
INCA unterstützt nun LIN-V2.2- und SAE-J2602-LDF-Dateien für das LIN-Monitoring.
- Import und Nutzung LIN-V2.2/-V2.2A-kompatibler LDF-Dateien
- Import und Nutzung SAE-J2602-kompatibler LDF-Dateien
- Nutzung LIN-V2.2-/-V2.2A-/SAE-J2602-kompatibler LDF-Projekte zum LIN-Monitoring in INCA
CAN-FD – Unterstützung von CAN Message Sending auf beliebigen CAN-IDs während des Flashens
Mit den ProF-Befehlen zur Übermittlung von CAN-Botschaften können nun CAN-FD-Botschaften gesendet werden, d. h. MAX_DLC beträgt nun 64 Bytes:
- CAN_SEND_MESSAGE (canId, canFrame)
- übermittelt CAN-/CAN-FD-Frames bis 64 Bytes über die vorgegebene CAN-ID
- unterstützt sämtliche CAN-IDs (11-Bit, 29-Bit, physikalisch und funktionell)
- CAN_SEND_CYCLIC_MESSAGE_START (stopID, cycleTime, canId, canFrame)
- startet einen Thread, um die konfigurierte CAN-/CAN-FD-Botschaft regelmäßig innerhalb der vorgegebenen Zykluszeit zu übertragen
- dient der zyklischen Übermittlung eines „TesterPresent“-Befehls, z. B. an andere Steuergeräte
- CAN_SEND_CYCLIC_MESSAGE_STOP (stopId)
- beendet den zyklisch sendenden Thread mit der gegebenen stopId
Ein typischer Anwendungsfall besteht darin, die Übermittlung von CAN-Bus-Botschaften mit einer speziellen CAN-Botschaft (einmalig und bei Bedarf zyklisch) an andere Steuergeräte zu deaktivieren (Deaktivierung der normalen Übermittlung von Botschaften).
Neue ASAP3-Schnittstelle bietet Kunden Informationen über die Tool-Konfiguration
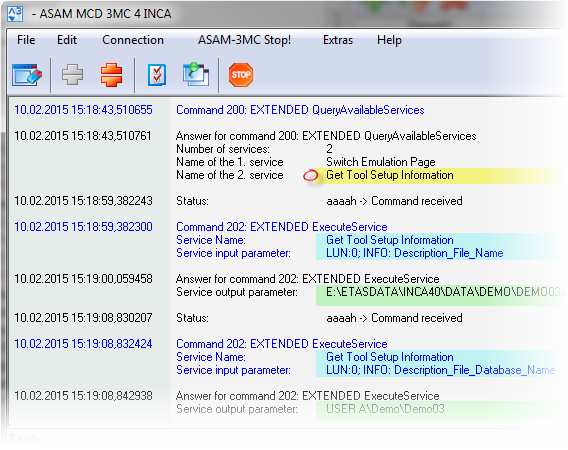
Für die spätere Analyse ist es wichtig, den verwendeten Testaufbau zu dokumentieren.
INCA stellt eine neue ASAP3-Schnittstelle bereit, mit der sich Informationen über die Tool-Konfiguration auslesen lassen.
Verbesserte grafische Visualisierung aktiver Signale in der Experimentierumgebung
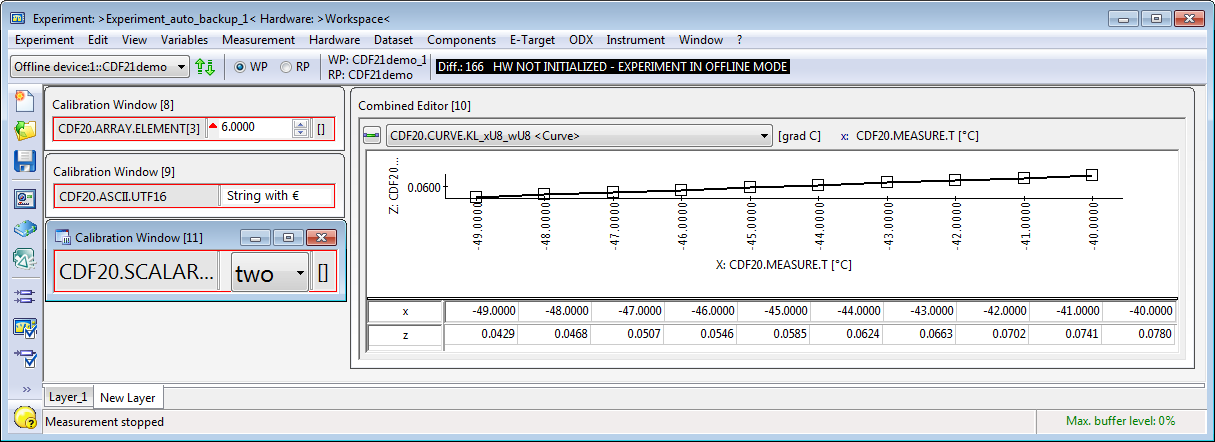
Das Experiment wird mit einem höheren Kontrast angezeigt, die Farben des inaktiven Anzeigefensters werden an die Hintergrundfarben angepasst.
Die Kontrollfelder der inaktiven Anzeigefenster verschwinden, stattdessen ist an dieser Stelle der Name des Anzeigefensters zu sehen; das aktive Anzeigefenster wird farbig eingerahmt.
J1939-Monitoring mit 250 kBaud und 500 kBaud
Ab Service Pack 8 unterstützt INCA für J1939-Monitoring die Kommunikation gemäß J1939-Standards mit Datenraten von 250 kBaud und 500 kBaud. Standardmäßig nutzt INCA 500 kBaud, wobei der Benutzer im Hardwarekonfigurationseditor wie gewohnt auf 250 kBaud umstellen kann.
Unterstützung von GNSS-Messgeräten in INCA
INCA unterstützt nun moderne globale Navigationssysteme (Global Navigation Satellite System, GNSS) wie GALILEO und GLONASS, die hochpräzise Standortdaten bereitstellen.
INCA unterstützt den Standard NMEA 0183 V4.1, der für GALILEO- und GLONASS-Geräte sowie künftige GNSS-Geräte erweitert wurde.