Functions at a glance
- Create optimized exports for ES720/ES820 Drive Recorder
- ProF – Full support of DoIP flashing
- CAN FD monitoring – Container PDUs
- CAN FD monitoring – Secure onboard communication (Secured I-PDU)
- ASAP3 – Read data exchange files in Experiment Environment
- Experiment – Display of progress bar while opening
- INCA options – GET / SET via COM API or ASAP3
- CDM - Variables in the output file name
- Improved SFH functionality
- Disable search for J2534 hardware
- ES922 – INCA integration
- ES584.1 – INCA integration
- INCA-SIP – Support of mask parameters
Create optimized exports for ES720/ES820 Drive Recorder

When using a drive recorder, not all information of an INCA workspace and the data linked to it are required. Therefore, the size of drive recorder export files created can be reduced by the following measures:
- Only used datasets are included
- CDM configurations are removed
- Application history is removed
- Key variable lists are removed
The additional option “optimized export” reduces the size of the export file once again:
- Calibration parameters are removed
- Measurement variables not being recorded are removed
Those optimizations lead to improvements in the drive recorder usage:
- Up to 25 % faster loading and initializing of the experiment on a drive recorder
- Up to 60 % smaller drive recorder export files compared to full export
- Up to 30 % less memory (RAM) consumption on a drive recorder
ProF – Full support of DoIP flashing
New generation ECUs also use the ISO13400 standard “Diagnostics over Internet Protocol” (DoIP) as interface. Therefore INCA users can flash these devices using the DoIP support by the INCA ProF script engine. New CNF parameters have been introduced for DoIP flashing:
- DOIP_IP_ADDRESS
Static ECU IP address as string (either V4 or V6 format), e.g., "192.168.0.100" - DOIP_SOURCE_ADDRESS
16-bit source address of the UDS message sender (INCA), e.g., "0x0E00" - DOIP_TARGET_ADDRESS
16-bit target address of the UDS message receiver (ECU), e.g., "0xE000" - DOIP_ENTITY_IDENTIFICATION
6 Byte DoIP entity identification (EID) that uniquely identifies a DoIP ECU - DOIP_SUBNET_ADDRESS
Subnet prefix address that is used by the DoIP network that contains the ECU to be flashed (either in V4 or V6 prefix notation), e.g., "192.168.40.0/24" or "2001:db8:abcd:0012::0/64" (the number behind the slash defines the number of prefix bits that are relevant for the subnet).
CAN FD monitoring – Container PDUs
AUTOSAR 4.2.2 introduces a feature to combine single PDU (protocol data unit) messages into a so called “container PDU”. The container PDU can contain PDUs from several sources by adding a header. This way, features of modern transport layers, e.g., CAN FD and Ethernet, such as bigger message length and better data throughput, can be leveraged. As first start, this feature is implemented in INCA for CAN FD.
Description format
- INCA accepts container PDU container description from arxml files
Variable (signal) selection
- The variables defined in the PDUs can be selected in INCA-VSD (Variable Selection Dialog) and recorded in files, e.g., in MDF format
Signals defined in more than one PDU
- INCA creates additionally to the original signal separated signals for each PDU with the scheme [orig-sig-name].[PDU-name]
Note: Feature is supported for all ETAS CAN FD devices with BOA support (Basic Open API)..
CAN FD monitoring – Secure onboard communication (Secured I-PDU)
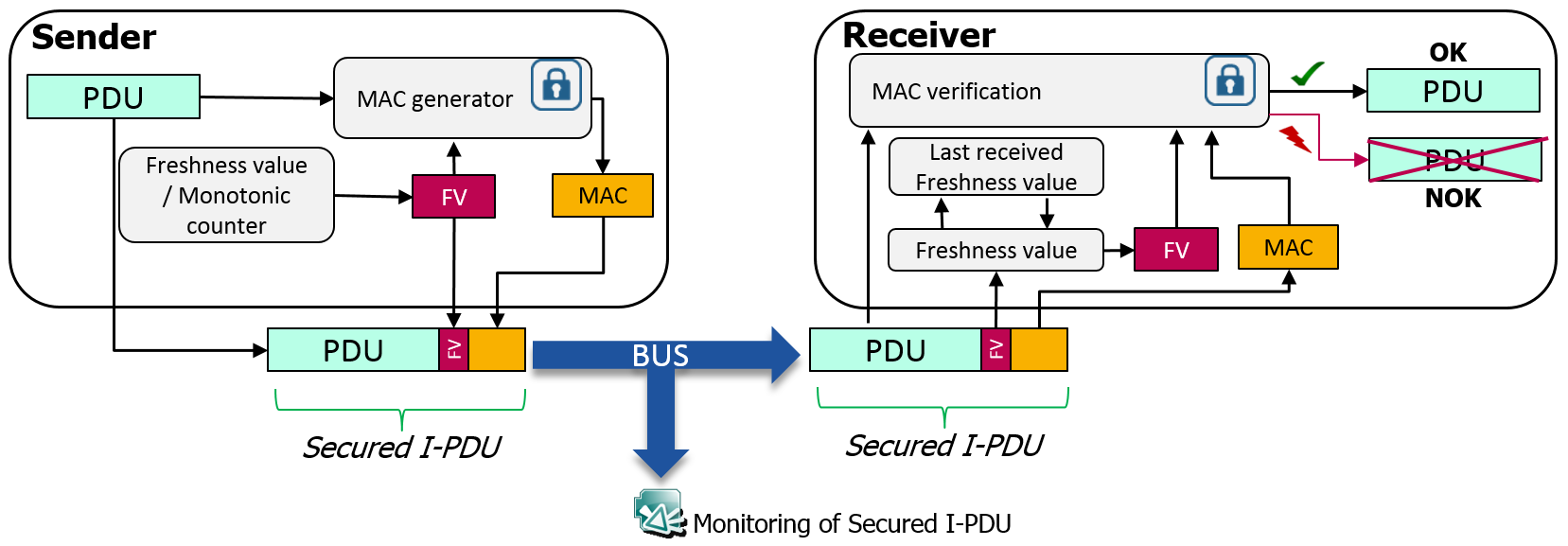
To prevent malicious attacks on modern vehicles’ infrastructure, AUTOSAR introduced a feature where each message can be verified to originate from the pristine device. This is done by adding a freshness value and message authentication code (MAC) thus obtaining a Secured I-PDU. INCA supports measurement and recording of signals defined in Secured I-PDUs in AUTOSAR files for CAN FD monitoring.
ASAP3 – Read data exchange files in Experiment Environment
If an ASAP3 client, e.g., a test bench requires to update a data set with a dedicated list of parameter values this can be done by using a new feature of the INCA ASAP3 server. The server supports an ASAP3 EXTENDED SERVICE to tell INCA the name and path of a data exchange file that INCA shall copy to the current working page:
- The path can be a local or a network path
- INCA respects the current copy settings
- INCA supports read / write of the copy settings via ASAP3
Experiment – Display of progress bar while opening
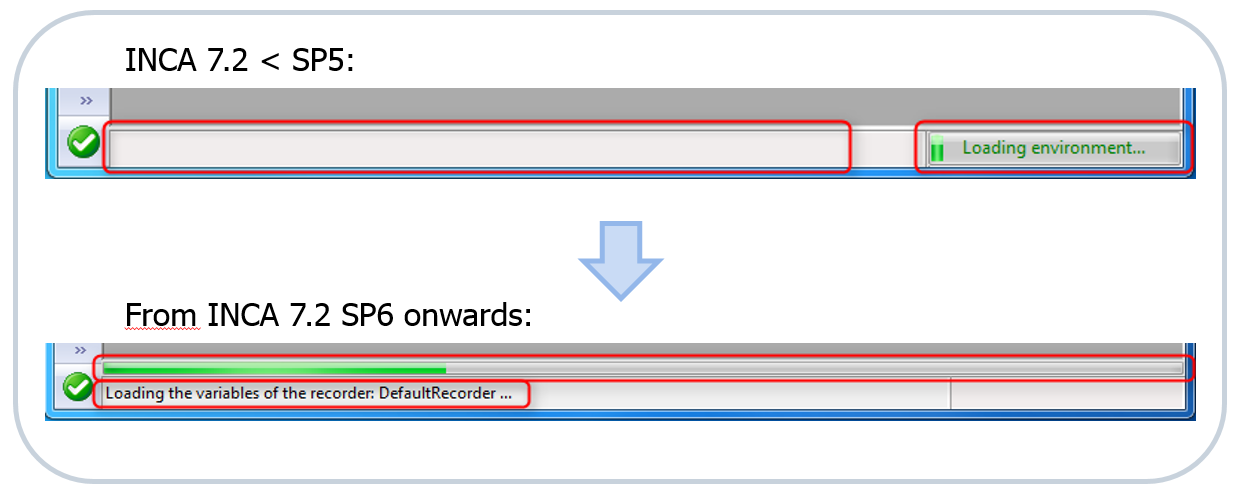
Opening a big experiment can take longer. In this case, the user wants to know when the experiment environment will be ready for operation. Therefore, the progress bar displayed when loading experiments has been improved. Now the progress bar advances in smaller steps. In addition, the currently processed element or procedure, e.g., opening the environment, a recorder, a layer, or initialization of the hardware is indicated in the status bar.
INCA options – GET/SET via COM API or ASAP3
The INCA COM-API supports GET and SET commands to access INCA options. The INCA ASAP3 server allows to do this by using the “GetOption” and “SetOption” parameters in an ASAP3 “EXTENDED SERVICES” command. The detailed list of options that can be read / write is stated in the INCA CEBRA documentation that is part of the INCA installation.
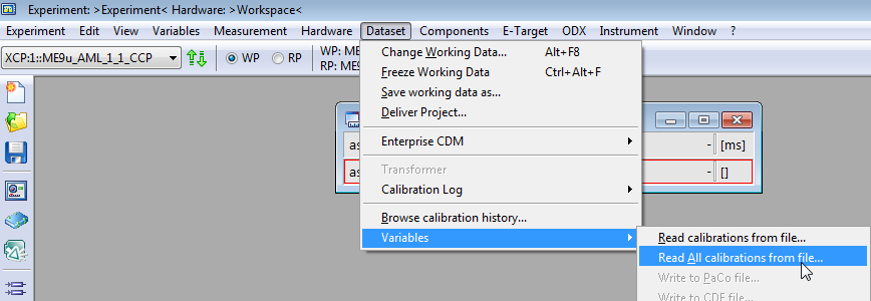
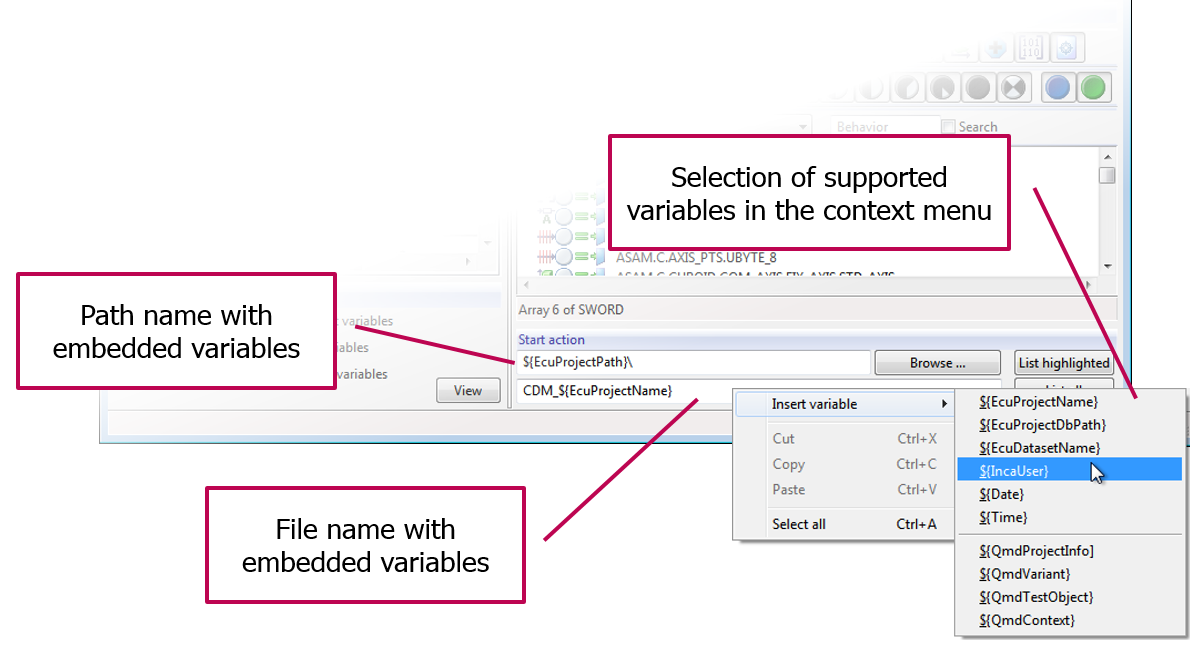
CDM – Variables in the output file name
When generating a lot of files it is helpful to re-use information that is already available. The Calibration Data Manager (CDM) supports the use of system variables to denominate the output file. In this case, the name of the output file is automatically adapted to the values of the related variables.
Improved SFH functionality
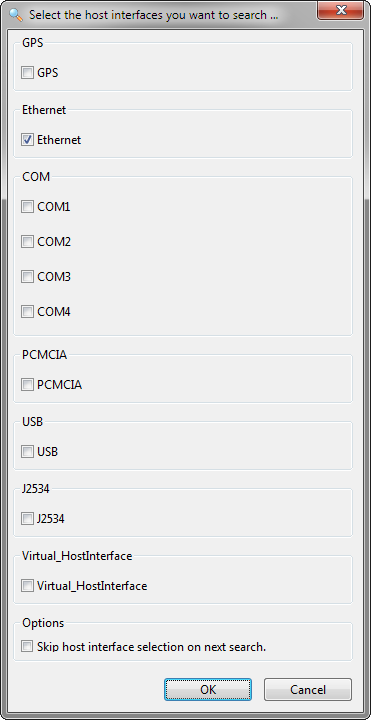
The SFH dialog (Search For Hardware)has been improved to increase the efficiency when searching for desired hardware interfaces. For Ethernet and USB hardware the search time is now up to 8-times faster!
Disable search for J2534 hardware
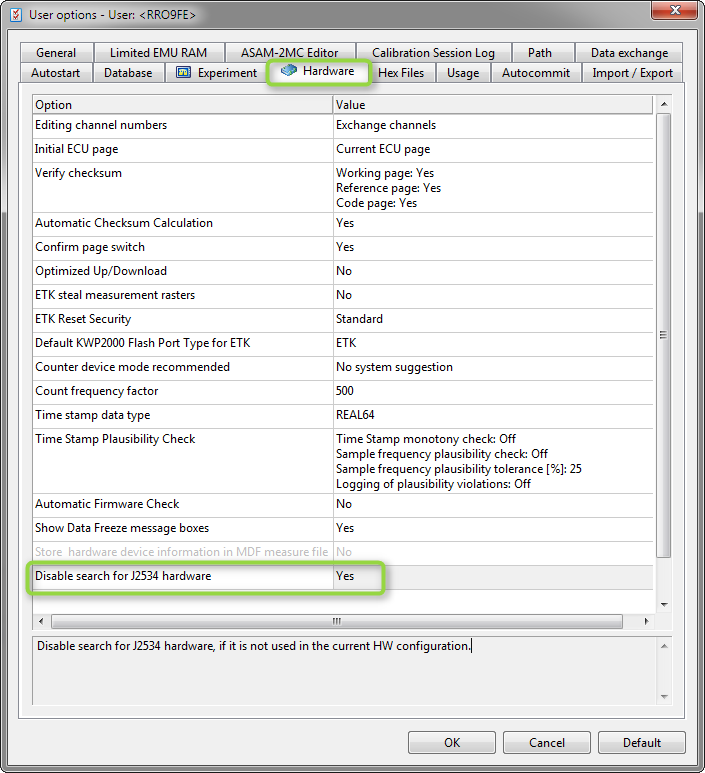
The user can disable search for J2534 hardware devices in order to avoid pop-up dialogs of 3rd party J2534 hardware. The default value of this new user option can also be defined in the INI-file.
ES922 – INCA integration

The ES922 is a CAN FD module for the ES910.3 Prototyping and Interface Module. It provides 2x CAN FD interfaces which can be used as CAN or CAN FD ports by INCA for monitoring, XCP, UDS, and ProF flashing. Both ISO and non-ISO CAN FD frame formats are supported.
ES584.1 – INCA integration
The ES584.1 USB module provides the following interfaces:
- 1 x CAN / CAN-FD channel
- 1 x LIN channel
- Parallel use of both channels using a Y cable
- Both ISO and non-ISO CAN FD frame formats are supported
INCA-SIP – Support of mask parameters
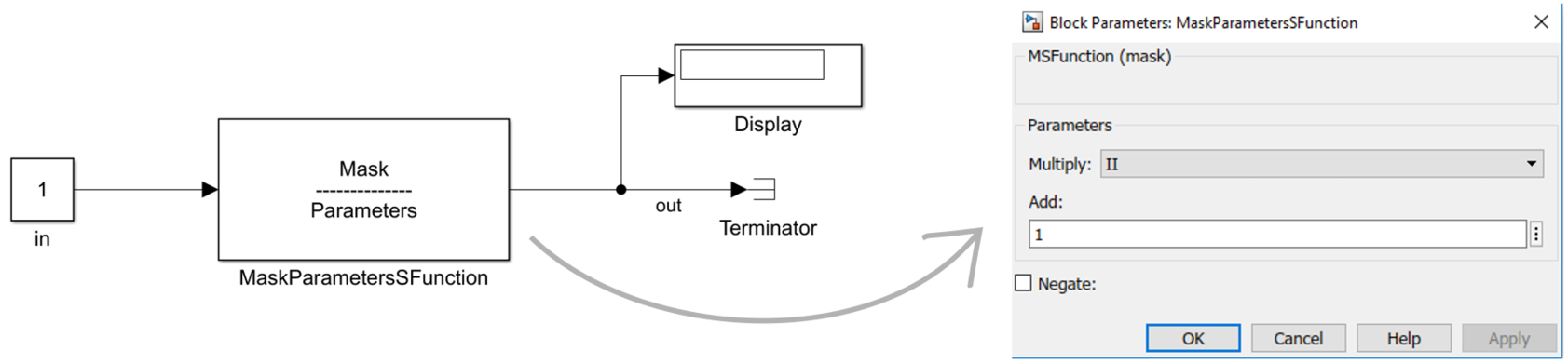
The behavior of MATLAB®/Simulink® S-Functions can be controlled by mask settings. Those can be displayed in the block dialog by double-clicking on the S-Function block:
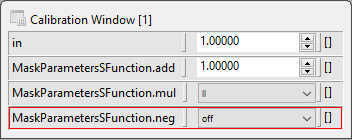
INCA-SIP now supports the calibration of these settings for edit fields, checkboxes and pop-ups with INCA.